

Modeling the neuro-mechanics of human balance when recovering from a fall: a continuous-time approach
- PMID: 32867771
- PMCID: PMC7457816
- DOI: 10.1186/s12938-020-00811-1
Modeling the neuro-mechanics of human balance when recovering from a fall: a continuous-time approach
Abstract
Background: Balance control deteriorates with age and nearly 30% of the elderly population in the United States reports stability problems. Postural stability is an integral task to daily living reliant upon the control of the ankle and hip. To this end, the estimation of joint parameters can be a useful tool when analyzing compensatory actions aimed at maintaining postural stability.
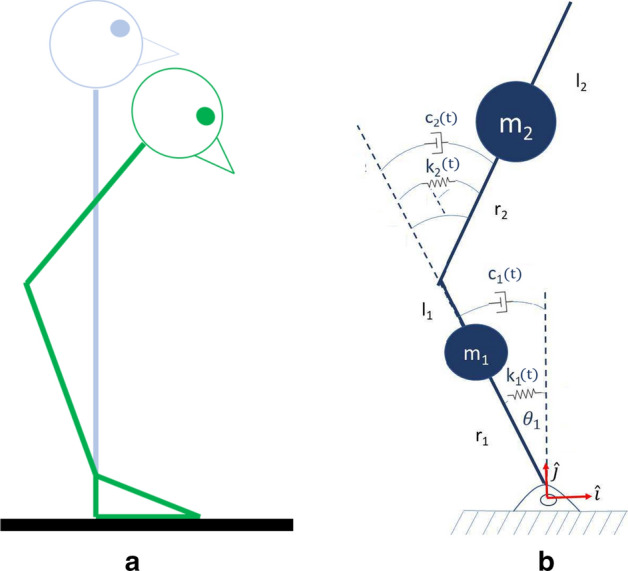
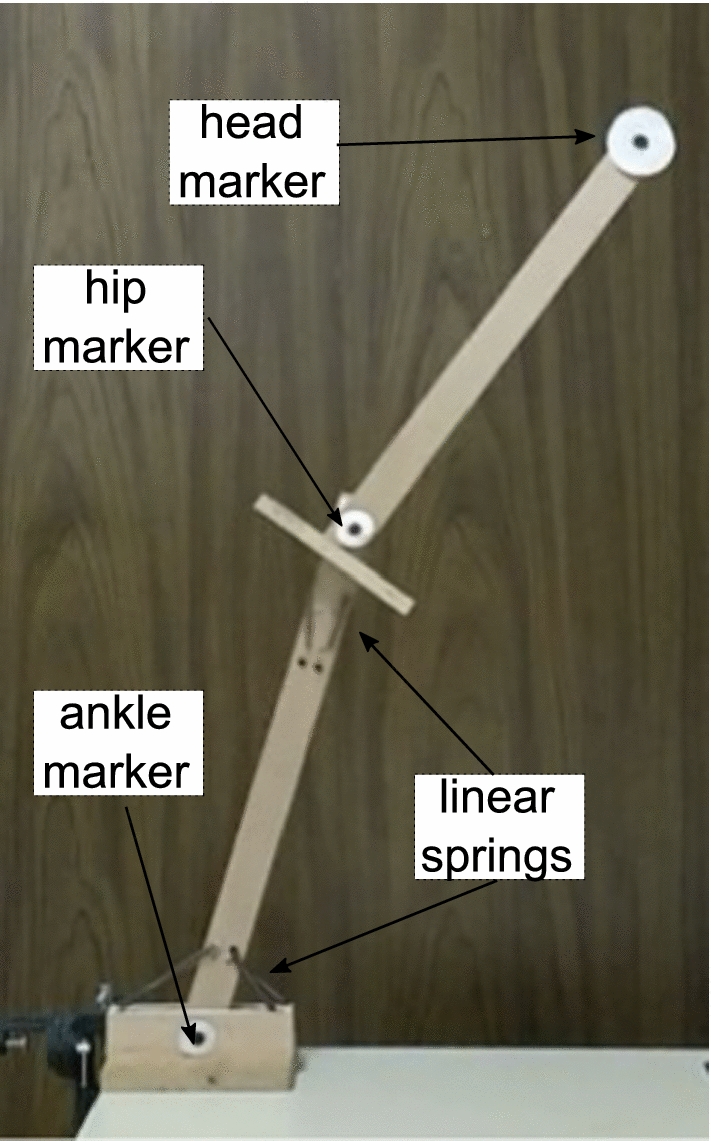
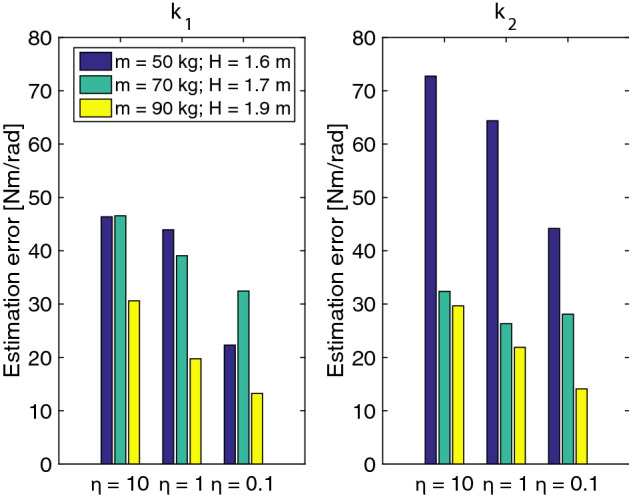
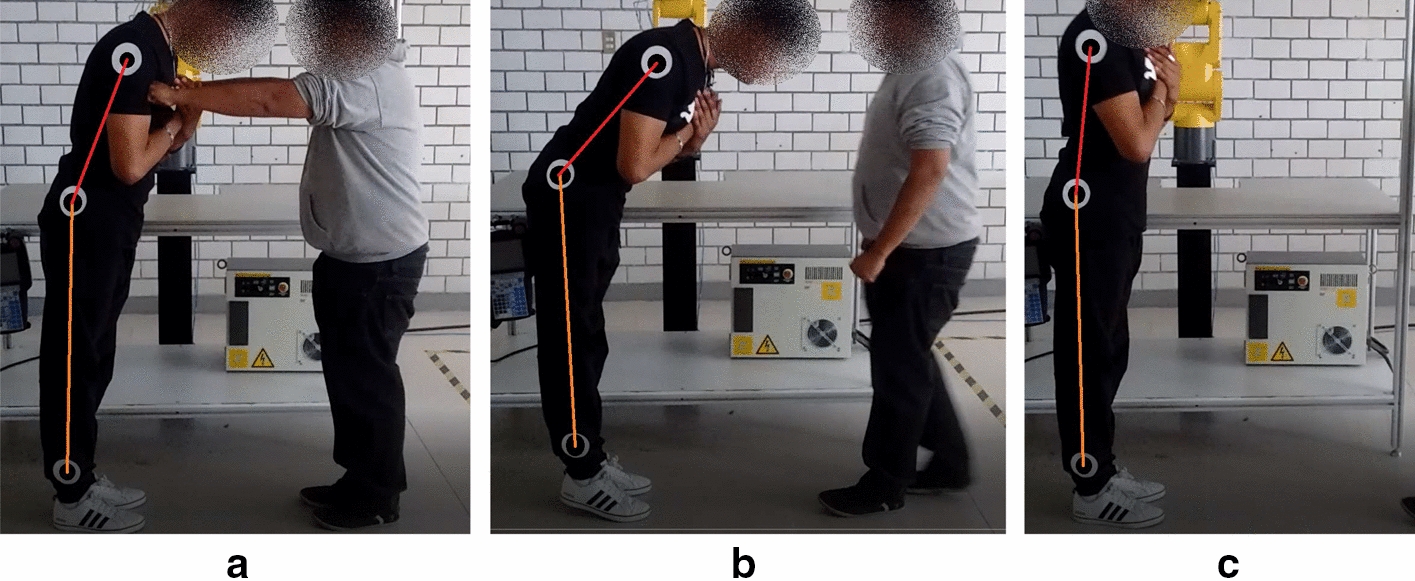
Methods: Using an analytical approach, this study expands on previous work and analyzes a two degrees of freedom human model. The first two modes of vibration of the system are represented by the neuro-mechanical parameters of a second-order, time-varying Kelvin-Voigt model actuated at the ankle and hip. The model is tested using a custom double inverted pendulum and healthy volunteers who were subjected to a positional step-like perturbation during quiet standing. An in silico sensitivity analysis of the influence of inertial parameters was also performed.
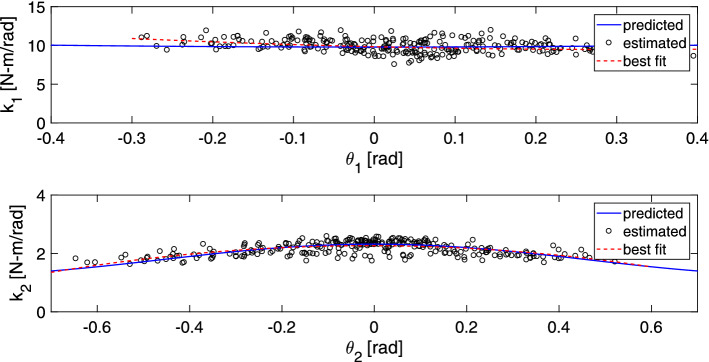
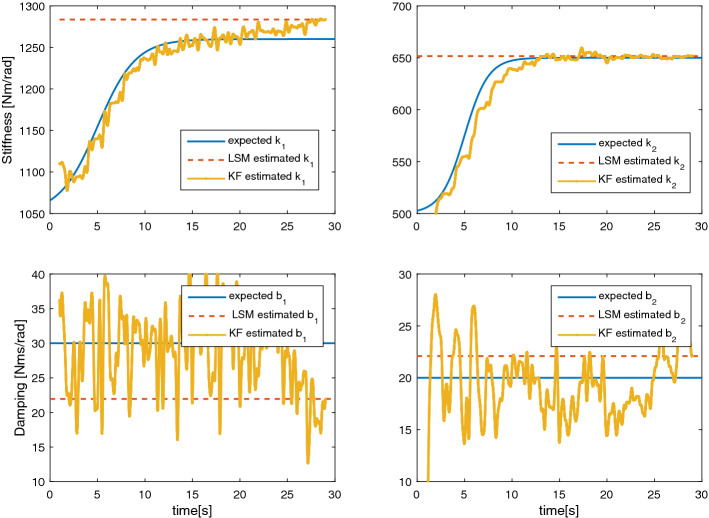
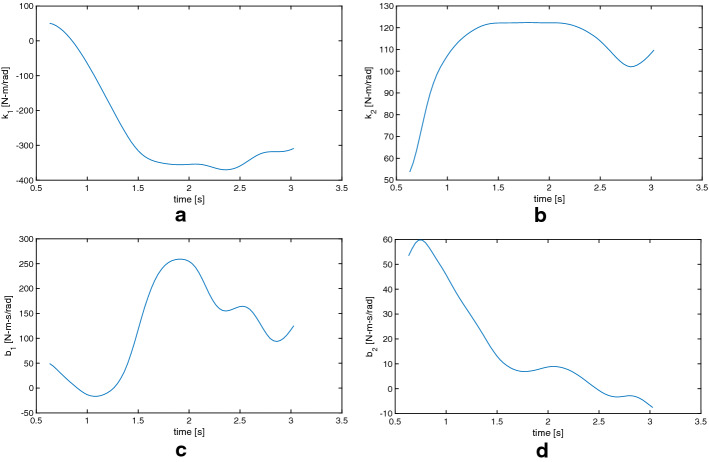
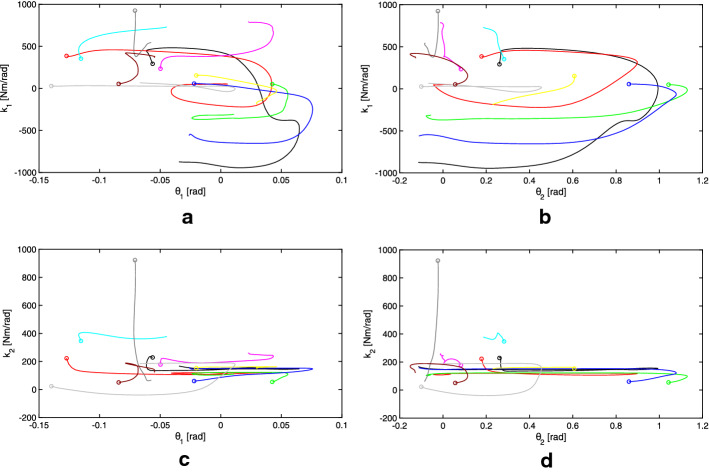
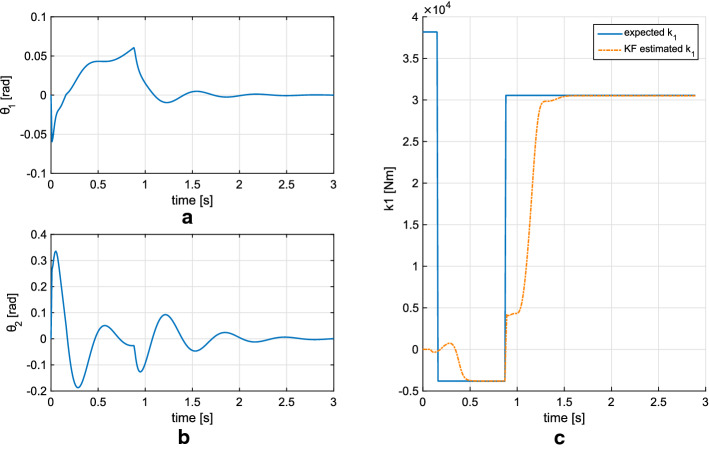
Results: The proposed method is able to correctly identify the time-varying visco-elastic parameters of of a double inverted pendulum. We show that that the parameter estimation method can be applied to standing humans. These results appear to identify a subject-independent strategy to control quiet standing that combines both the modulation of stiffness, and the use of an intermittent control.
Conclusions: This paper presents the analysis of the non-linear system of differential equations representing the control of lumped muscle-tendon units. It utilizes motion capture measurements to obtain the estimates of the system's control parameters by constructing a simple time-dependent regressor for estimating the time-varying parameters of the control with a single perturbation. This work is a step forward into the understanding of the neuro-mechanical control parameters of human recovering from a fall. In previous literature, the analysis is either restricted to the first vibrational mode of an inverted-pendulum model or assumed to be time-invariant. The proposed method allows for the analysis of hip related movement for stability control and highlights the importance of core training.
Keywords: Dynamic model; Human balance; Parameter estimation.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures
Similar articles
-
Experimental Estimation of a Second Order, Double Inverted Pendulum Parameters for the study of Human Balancing.Annu Int Conf IEEE Eng Med Biol Soc. 2019 Jul;2019:4117-4120. doi: 10.1109/EMBC.2019.8857611. Annu Int Conf IEEE Eng Med Biol Soc. 2019. PMID: 31946776
-
Frequency-dependent force direction elucidates neural control of balance.J Neuroeng Rehabil. 2021 Sep 25;18(1):145. doi: 10.1186/s12984-021-00907-2. J Neuroeng Rehabil. 2021. PMID: 34563223 Free PMC article.
-
Human foot force informs balance control strategies when standing on a narrow beam.J Neurophysiol. 2024 Oct 1;132(4):1302-1314. doi: 10.1152/jn.00089.2024. Epub 2024 Sep 11. J Neurophysiol. 2024. PMID: 39258774
-
A two-joint human posture control model with realistic neural delays.IEEE Trans Neural Syst Rehabil Eng. 2012 Sep;20(5):738-48. doi: 10.1109/TNSRE.2012.2199333. Epub 2012 Jun 6. IEEE Trans Neural Syst Rehabil Eng. 2012. PMID: 22692939 Review.
-
Mechanisms and models of postural stability and control.Annu Int Conf IEEE Eng Med Biol Soc. 2011;2011:7837-40. doi: 10.1109/IEMBS.2011.6091931. Annu Int Conf IEEE Eng Med Biol Soc. 2011. PMID: 22256156 Review.
Cited by
-
Kinematic Comparison on Lower Limb Kicking Action of Fetuses in Different Gestational Weeks: A Pilot Study.Healthcare (Basel). 2021 Aug 18;9(8):1057. doi: 10.3390/healthcare9081057. Healthcare (Basel). 2021. PMID: 34442194 Free PMC article.
-
Humans self-organise balance control strategies on a dynamic platform.Sci Rep. 2025 Jul 8;15(1):24366. doi: 10.1038/s41598-025-09127-3. Sci Rep. 2025. PMID: 40628838 Free PMC article.
-
The Relationship between the Static and Dynamic Balance of the Body, the Influence of Eyesight and Muscle Tension in the Cervical Spine in CAA Patients-A Pilot Study.Diagnostics (Basel). 2021 Nov 3;11(11):2036. doi: 10.3390/diagnostics11112036. Diagnostics (Basel). 2021. PMID: 34829382 Free PMC article.
-
Construction and Simulation of Biomechanical Model of Human Hip Joint Muscle-Tendon Assisted by Elastic External Tendon by Hill Muscle Model.Comput Intell Neurosci. 2022 Aug 2;2022:1987345. doi: 10.1155/2022/1987345. eCollection 2022. Comput Intell Neurosci. 2022. PMID: 35958782 Free PMC article.
References
-
- Menz HB, Morris ME, Lord SR. Foot and Ankle characteristics associated with impaired balance and functional ability in older people. J Gerontol Ser A Biol Sci Med Sci. 2005;60(12):1546–1552. - PubMed
-
- Painter JA, Elliott SJ, Hudson S. Falls in community-dwelling adults aged 50 years and older: prevalence and contributing factors. J Allied Health. 2009;38(4):201–207. - PubMed
-
- Kiratli BJ. Immobilization osteopenia. In: Marcus R, Feldman D, Kelsey J, editors. Osteoporosis. San Diego: Academic Press; 2001. pp. 207–227.
-
- Chavez-Romero R, Cárdenas A, Maya M, Vernassa K, Piovesan D. Experimental validation of vision-based system for the characterization of human standing. In: Proceedings of the Latin American congress of automatic control (IFAC-CLCA). Cancun, Quintana Roo, Mexico; 2014. p. 301–6.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
