

Polarity of uncertainty representation during exploration and exploitation in ventromedial prefrontal cortex
- PMID: 32868885
- PMCID: PMC7116777
- DOI: 10.1038/s41562-020-0929-3
Polarity of uncertainty representation during exploration and exploitation in ventromedial prefrontal cortex
Abstract
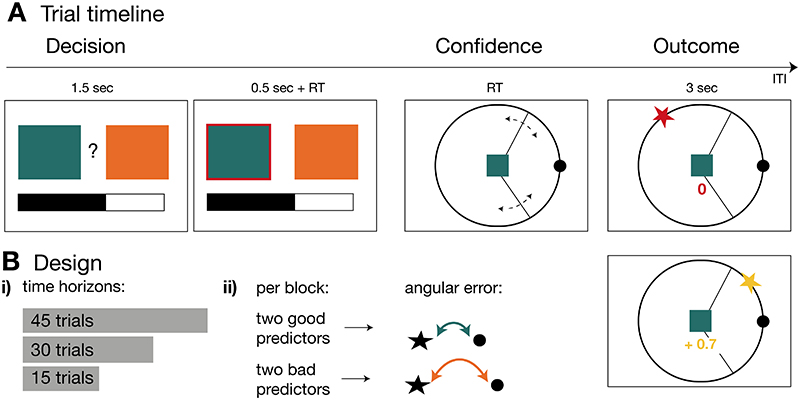
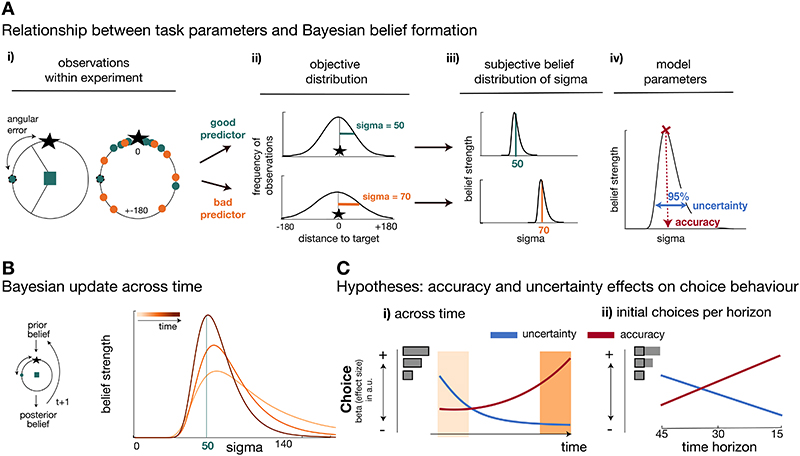
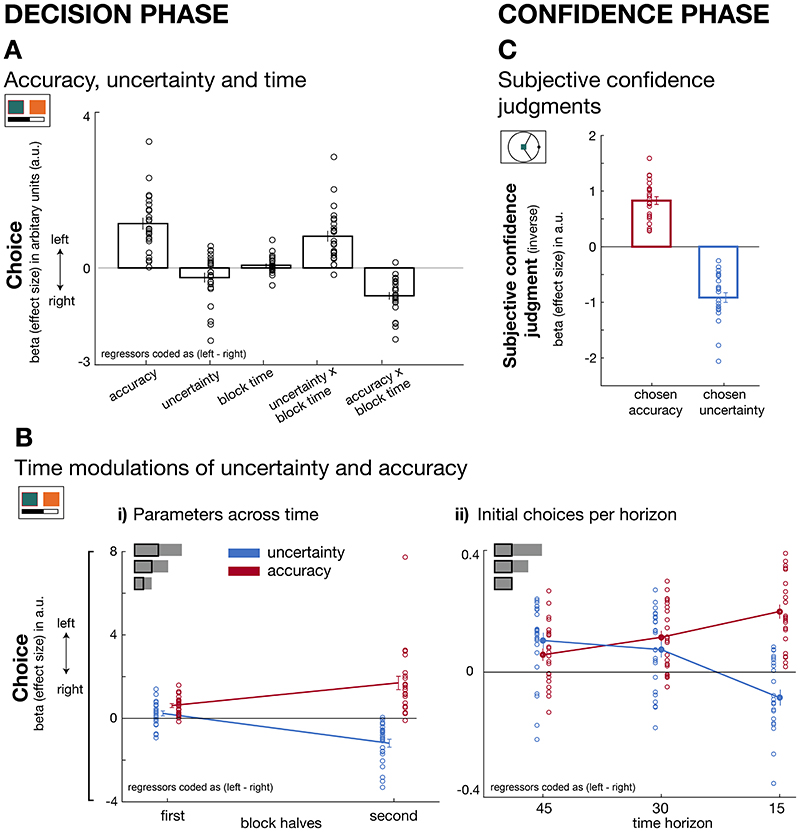
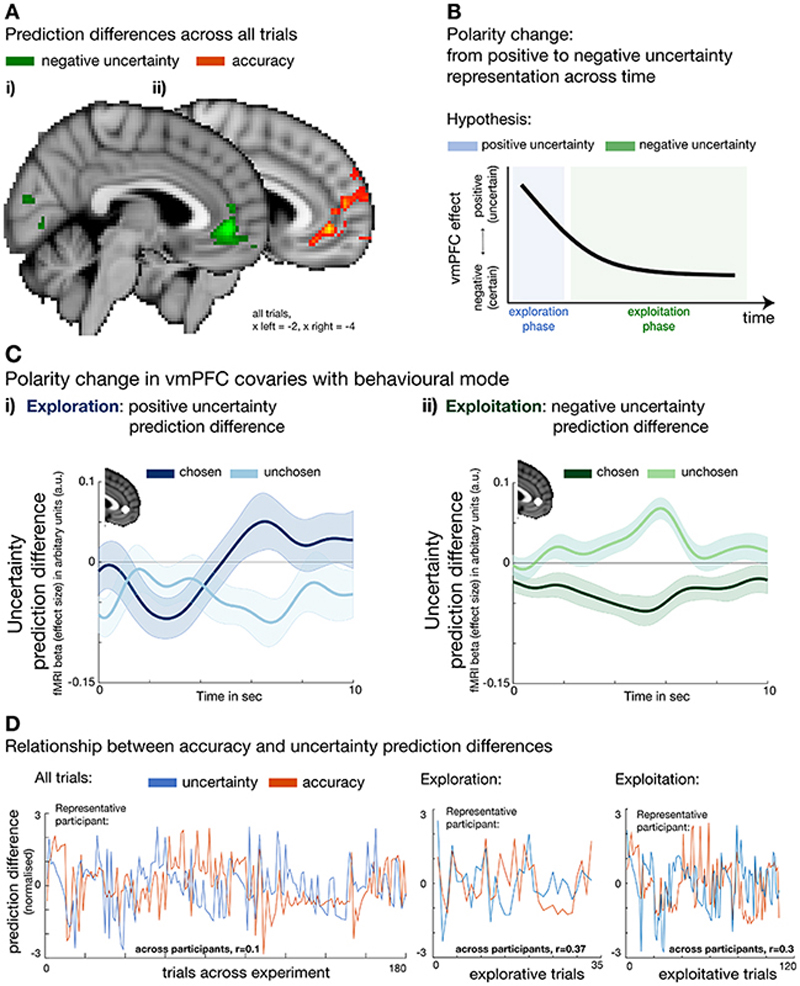
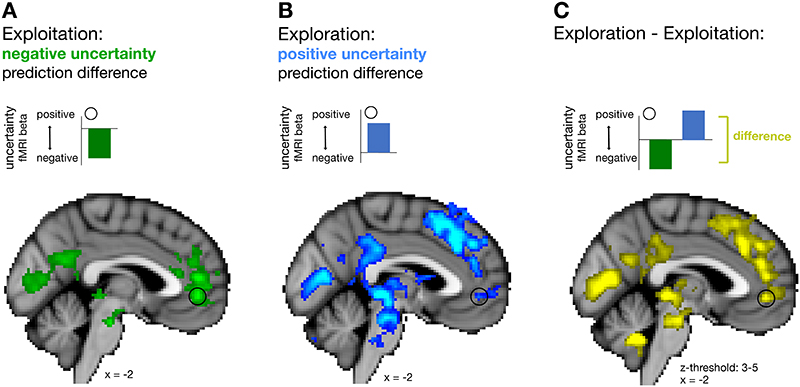
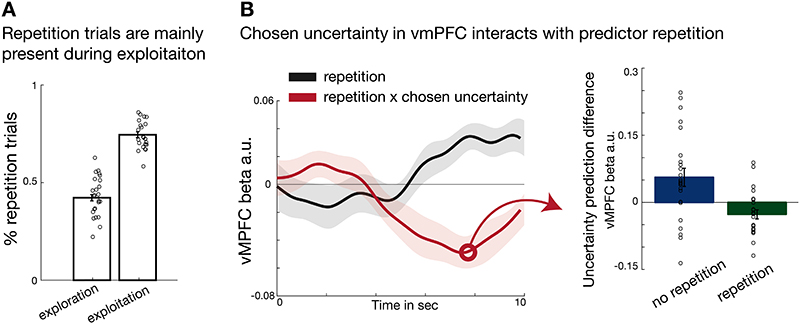
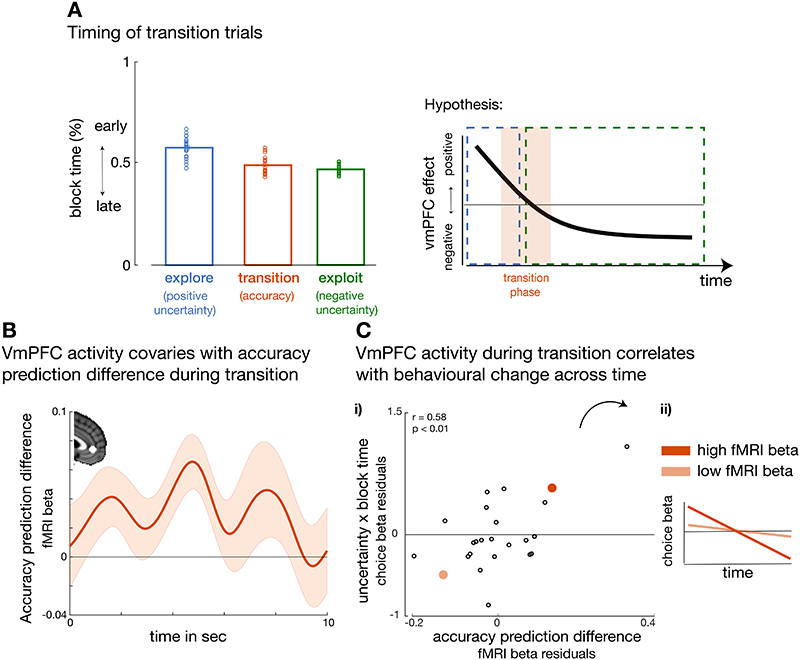
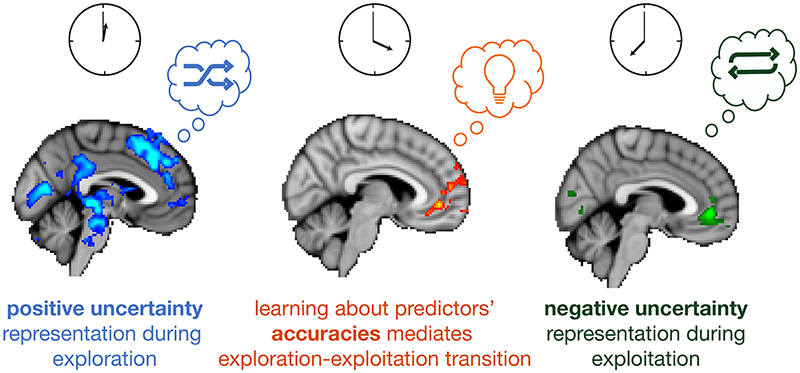
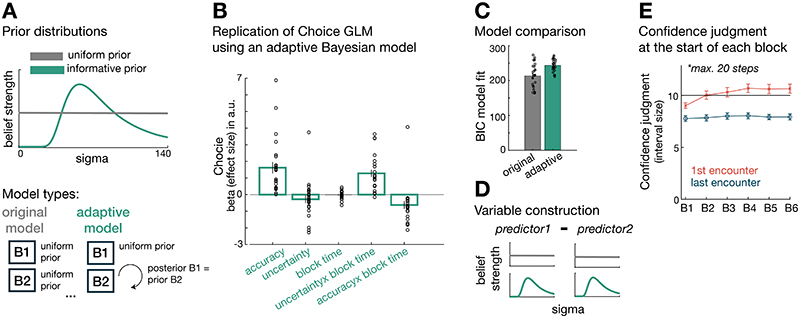
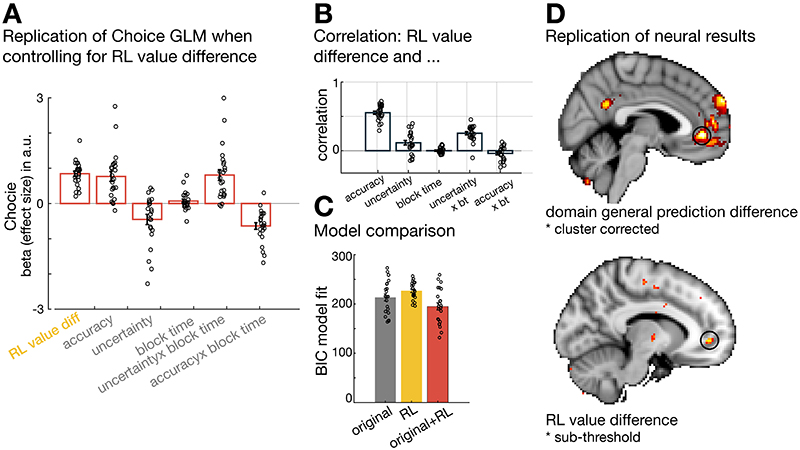
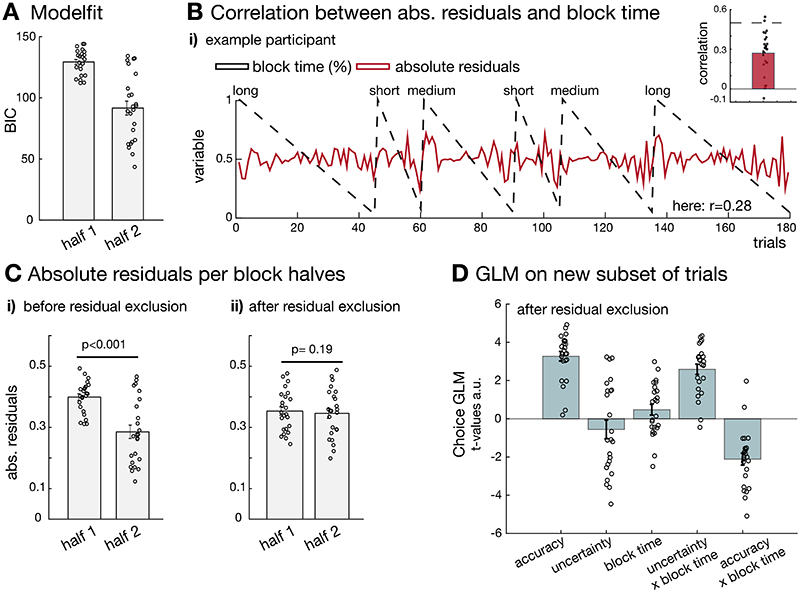
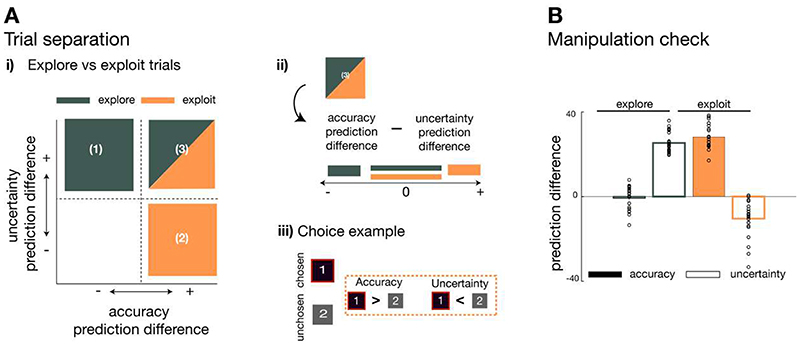
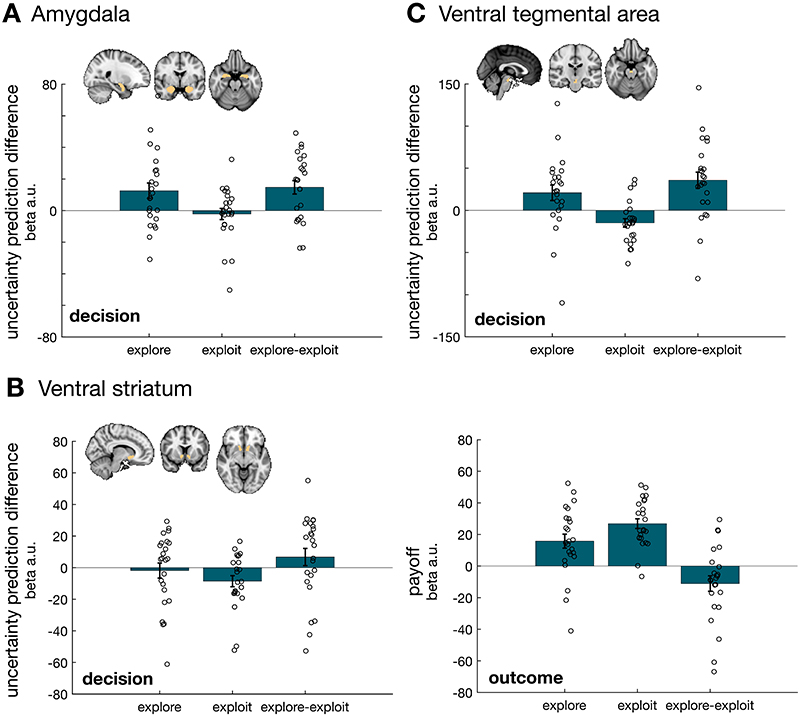
Environments furnish multiple information sources for making predictions about future events. Here we use behavioural modelling and functional magnetic resonance imaging to describe how humans select predictors that might be most relevant. First, during early encounters with potential predictors, participants' selections were explorative and directed towards subjectively uncertain predictors (positive uncertainty effect). This was particularly the case when many future opportunities remained to exploit knowledge gained. Then, preferences for accurate predictors increased over time, while uncertain predictors were avoided (negative uncertainty effect). The behavioural transition from positive to negative uncertainty-driven selections was accompanied by changes in the representations of belief uncertainty in ventromedial prefrontal cortex (vmPFC). The polarity of uncertainty representations (positive or negative encoding of uncertainty) changed between exploration and exploitation periods. Moreover, the two periods were separated by a third transitional period in which beliefs about predictors' accuracy predominated. The vmPFC signals a multiplicity of decision variables, the strength and polarity of which vary with behavioural context.
Conflict of interest statement
Competing interest
The authors declare no financial or non-financial competing interests.
Figures
Comment in
-
Imprecise learning and uncertainty.Nat Hum Behav. 2021 Jan;5(1):7-8. doi: 10.1038/s41562-020-00992-8. Nat Hum Behav. 2021. PMID: 33168952 No abstract available.
References
-
- Mackintosh NJ. A theory of attention: Variations in the associability of stimuli with reinforcement. Psychological Review. 1975;82:276–298.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
