

Hand-Gesture Recognition Based on EMG and Event-Based Camera Sensor Fusion: A Benchmark in Neuromorphic Computing
- PMID: 32903824
- PMCID: PMC7438887
- DOI: 10.3389/fnins.2020.00637
Hand-Gesture Recognition Based on EMG and Event-Based Camera Sensor Fusion: A Benchmark in Neuromorphic Computing
Abstract
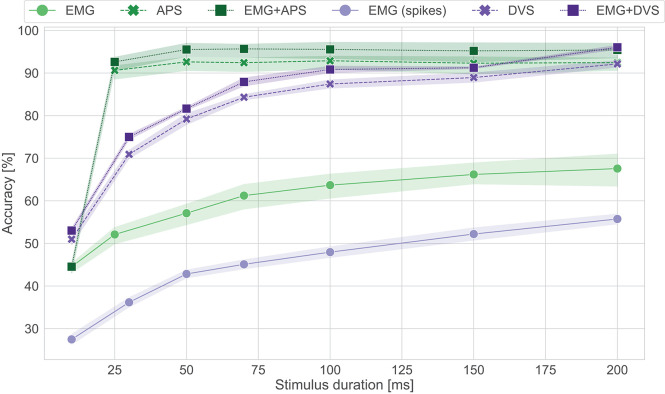
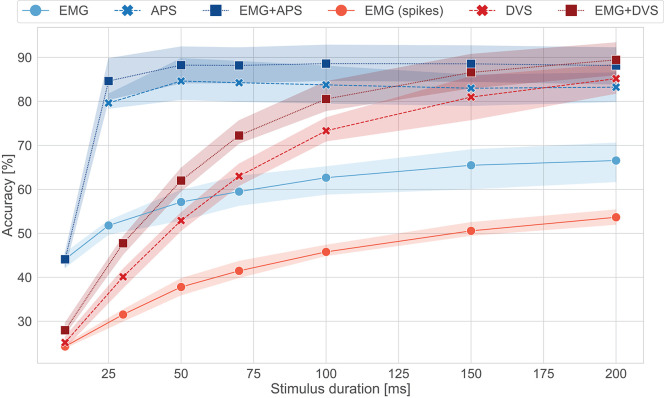
Hand gestures are a form of non-verbal communication used by individuals in conjunction with speech to communicate. Nowadays, with the increasing use of technology, hand-gesture recognition is considered to be an important aspect of Human-Machine Interaction (HMI), allowing the machine to capture and interpret the user's intent and to respond accordingly. The ability to discriminate between human gestures can help in several applications, such as assisted living, healthcare, neuro-rehabilitation, and sports. Recently, multi-sensor data fusion mechanisms have been investigated to improve discrimination accuracy. In this paper, we present a sensor fusion framework that integrates complementary systems: the electromyography (EMG) signal from muscles and visual information. This multi-sensor approach, while improving accuracy and robustness, introduces the disadvantage of high computational cost, which grows exponentially with the number of sensors and the number of measurements. Furthermore, this huge amount of data to process can affect the classification latency which can be crucial in real-case scenarios, such as prosthetic control. Neuromorphic technologies can be deployed to overcome these limitations since they allow real-time processing in parallel at low power consumption. In this paper, we present a fully neuromorphic sensor fusion approach for hand-gesture recognition comprised of an event-based vision sensor and three different neuromorphic processors. In particular, we used the event-based camera, called DVS, and two neuromorphic platforms, Loihi and ODIN + MorphIC. The EMG signals were recorded using traditional electrodes and then converted into spikes to be fed into the chips. We collected a dataset of five gestures from sign language where visual and electromyography signals are synchronized. We compared a fully neuromorphic approach to a baseline implemented using traditional machine learning approaches on a portable GPU system. According to the chip's constraints, we designed specific spiking neural networks (SNNs) for sensor fusion that showed classification accuracy comparable to the software baseline. These neuromorphic alternatives have increased inference time, between 20 and 40%, with respect to the GPU system but have a significantly smaller energy-delay product (EDP) which makes them between 30× and 600× more efficient. The proposed work represents a new benchmark that moves neuromorphic computing toward a real-world scenario.
Keywords: electromyography (EMG) signal processing; event-based camera; hand-gesture classification; neuromorphic engineering; sensor fusion; spiking neural networks (SNNs).
Copyright © 2020 Ceolini, Frenkel, Shrestha, Taverni, Khacef, Payvand and Donati.
Figures




Similar articles
-
Comparing SNNs and RNNs on neuromorphic vision datasets: Similarities and differences.Neural Netw. 2020 Dec;132:108-120. doi: 10.1016/j.neunet.2020.08.001. Epub 2020 Aug 17. Neural Netw. 2020. PMID: 32866745
-
Neuromorphic Sentiment Analysis Using Spiking Neural Networks.Sensors (Basel). 2023 Sep 6;23(18):7701. doi: 10.3390/s23187701. Sensors (Basel). 2023. PMID: 37765758 Free PMC article.
-
Braille letter reading: A benchmark for spatio-temporal pattern recognition on neuromorphic hardware.Front Neurosci. 2022 Nov 11;16:951164. doi: 10.3389/fnins.2022.951164. eCollection 2022. Front Neurosci. 2022. PMID: 36440280 Free PMC article.
-
Application of Event Cameras and Neuromorphic Computing to VSLAM: A Survey.Biomimetics (Basel). 2024 Jul 20;9(7):444. doi: 10.3390/biomimetics9070444. Biomimetics (Basel). 2024. PMID: 39056885 Free PMC article. Review.
-
Deep Learning With Spiking Neurons: Opportunities and Challenges.Front Neurosci. 2018 Oct 25;12:774. doi: 10.3389/fnins.2018.00774. eCollection 2018. Front Neurosci. 2018. PMID: 30410432 Free PMC article. Review.
Cited by
-
A neuromorphic multi-scale approach for real-time heart rate and state detection.Npj Unconv Comput. 2025;2(1):6. doi: 10.1038/s44335-025-00024-6. Epub 2025 Apr 2. Npj Unconv Comput. 2025. PMID: 40191602 Free PMC article.
-
Neuromorphic hardware for somatosensory neuroprostheses.Nat Commun. 2024 Jan 16;15(1):556. doi: 10.1038/s41467-024-44723-3. Nat Commun. 2024. PMID: 38228580 Free PMC article. Review.
-
Application of Wireless Network Multisensor Fusion Technology in Sports Training.Comput Intell Neurosci. 2022 Jun 3;2022:9836697. doi: 10.1155/2022/9836697. eCollection 2022. Comput Intell Neurosci. 2022. Retraction in: Comput Intell Neurosci. 2023 Dec 13;2023:9760595. doi: 10.1155/2023/9760595. PMID: 35694566 Free PMC article. Retracted.
-
Machine-learned wearable sensors for real-time hand-motion recognition: toward practical applications.Natl Sci Rev. 2023 Nov 27;11(2):nwad298. doi: 10.1093/nsr/nwad298. eCollection 2024 Feb. Natl Sci Rev. 2023. PMID: 38213520 Free PMC article. Review.
-
Spiking neural networks for nonlinear regression.R Soc Open Sci. 2024 May 1;11(5):231606. doi: 10.1098/rsos.231606. eCollection 2024 May. R Soc Open Sci. 2024. PMID: 38699557 Free PMC article.
References
-
- Amir A., Taba B., Berg D., Melano T., McKinstry J., Nolfo C. D., et al. (2017). “A low power, fully event-based gesture recognition system,” in 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (Honolulu, HI: ), 7388–7397. 10.1109/CVPR.2017.781 - DOI
-
- Barker J., Marxer R., Vincent E., Watanabe S. (2015). “The third ‘chime’ speech separation and recognition challenge: dataset, task and baselines,” in 2015 IEEE Workshop on Automatic Speech Recognition and Understanding (ASRU) (Scottsdale, AZ: ), 504–511. 10.1109/ASRU.2015.7404837 - DOI
LinkOut - more resources
Full Text Sources