

Functional advantages of Lévy walks emerging near a critical point
- PMID: 32929032
- PMCID: PMC7533831
- DOI: 10.1073/pnas.2001548117
Functional advantages of Lévy walks emerging near a critical point
Abstract
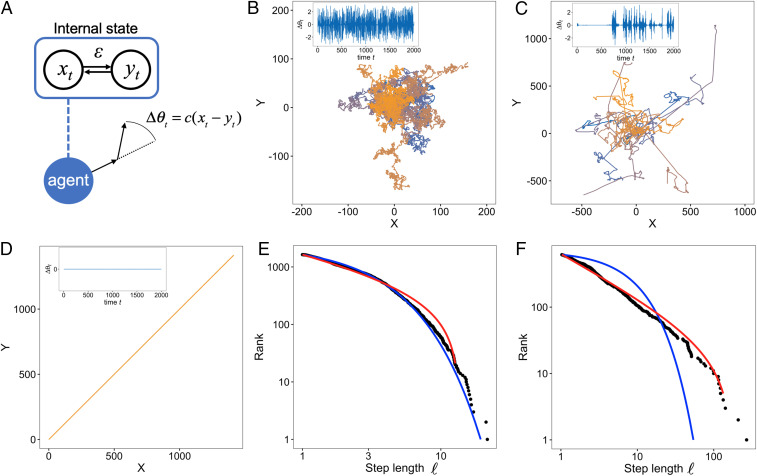
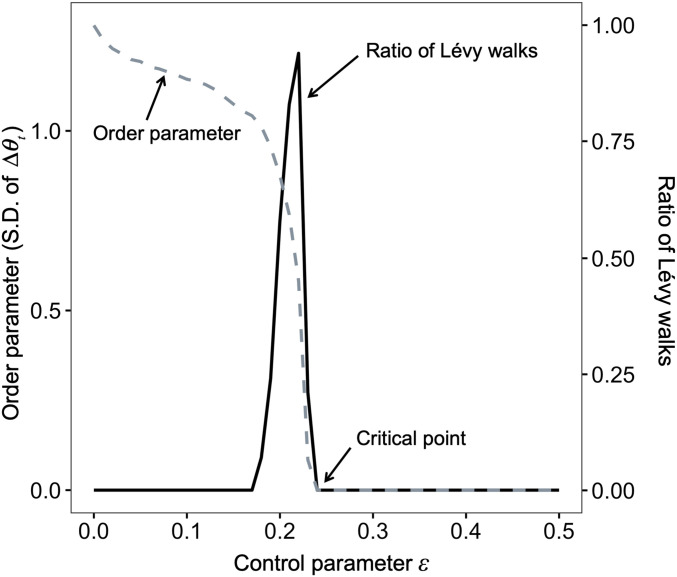
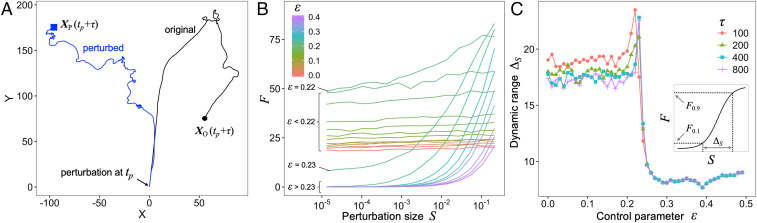
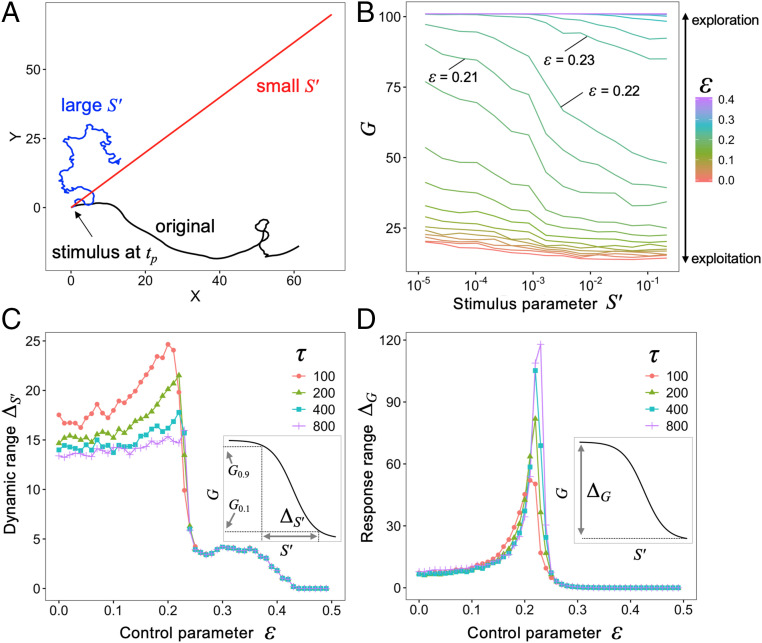
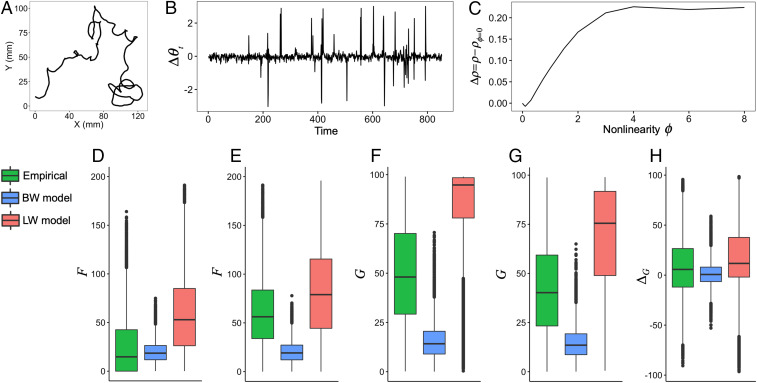
A special class of random walks, so-called Lévy walks, has been observed in a variety of organisms ranging from cells, insects, fishes, and birds to mammals, including humans. Although their prevalence is considered to be a consequence of natural selection for higher search efficiency, some findings suggest that Lévy walks might also be epiphenomena that arise from interactions with the environment. Therefore, why they are common in biological movements remains an open question. Based on some evidence that Lévy walks are spontaneously generated in the brain and the fact that power-law distributions in Lévy walks can emerge at a critical point, we hypothesized that the advantages of Lévy walks might be enhanced by criticality. However, the functional advantages of Lévy walks are poorly understood. Here, we modeled nonlinear systems for the generation of locomotion and showed that Lévy walks emerging near a critical point had optimal dynamic ranges for coding information. This discovery suggested that Lévy walks could change movement trajectories based on the magnitude of environmental stimuli. We then showed that the high flexibility of Lévy walks enabled switching exploitation/exploration based on the nature of external cues. Finally, we analyzed the movement trajectories of freely moving Drosophila larvae and showed empirically that the Lévy walks may emerge near a critical point and have large dynamic range and high flexibility. Our results suggest that the commonly observed Lévy walks emerge near a critical point and could be explained on the basis of these functional advantages.
Keywords: autonomous agent; criticality; movement ecology; nonlinear dynamics; random search.
Conflict of interest statement
The author declares no competing interest.
Figures
References
-
- Viswanathan G. M., da Luz M. G. E., Raposo E. P., Stanley H. E., The Physics of Foraging: An Introduction to Random Searches and Biological Encounters (Cambridge University Press, 2011).
-
- Humphries N. E., et al. , Environmental context explains lévy and brownian movement patterns of marine predators. Nature 465, 1066–1069 (2010). - PubMed
Publication types
MeSH terms
Associated data
LinkOut - more resources
Full Text Sources
Molecular Biology Databases
