

Robotic-Assisted Pedicle Screw Placement During Spine Surgery
- PMID: 32944411
- PMCID: PMC7478327
- DOI: 10.2106/JBJS.ST.19.00020
Robotic-Assisted Pedicle Screw Placement During Spine Surgery
Abstract
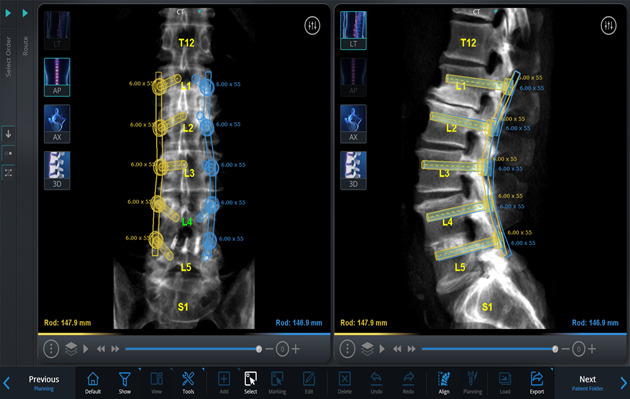
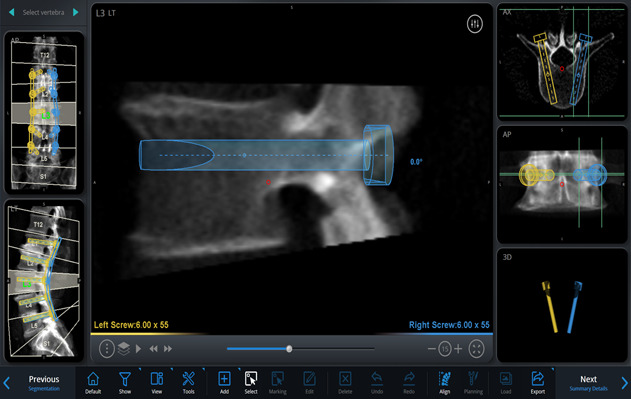
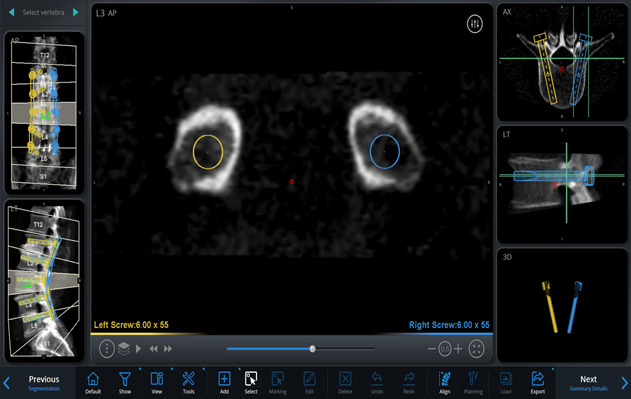
Preoperative planning software and a robotic device facilitate the placement of pedicle screws, especially in patients with difficult anatomy, thereby increasing the feasibility, accuracy, and efficiency of the procedure. The robot functions as a semiactive surgical assistive device whose goal is not to substitute but to offer the surgeon a set of versatile tools that can broaden his or her ability to treat patients1.
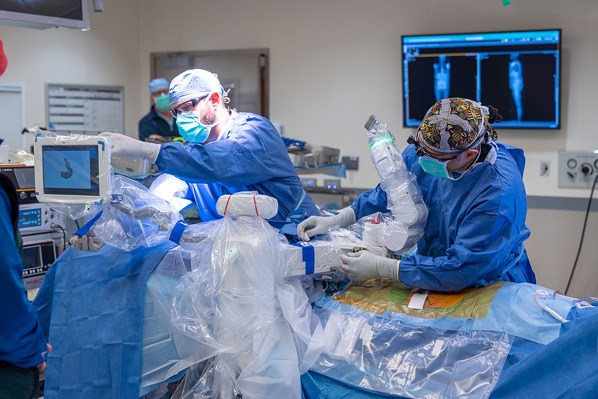
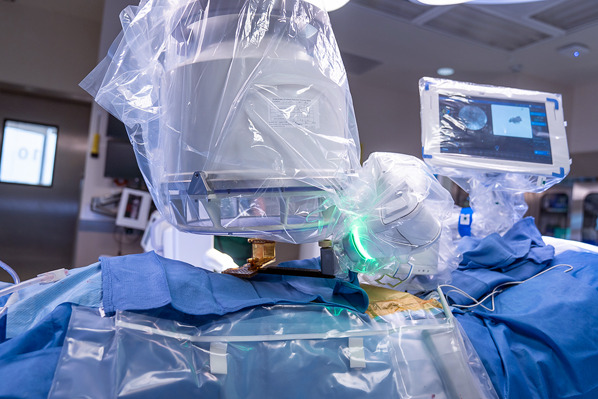
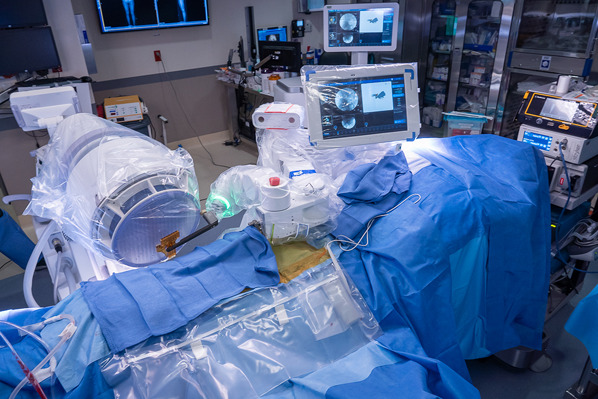
Description: The robotic guidance system consists of a bed-mounted surgical arm and a workstation. We used the Mazor X Stealth Edition Robotic Guidance System by Medtronic for spine surgery, which has been previously described2-5. Unlike other systems that are navigation-based and require an optical tracking mechanism, this system relies on the preoperative plan to be referenced using the intraoperative registration. The workstation runs an interface software that facilitates preoperative planning, intraoperative image acquisition and registration, kinematic calculations, and real-time robot motion control. The robotic arm is mounted onto the bed as well as rigidly attached to the patient's spine. It can move in 6 degrees of freedom to provide the preplanned screw trajectory and entry point thereby allowing the surgeon to manually perform the drilling and screw insertion through either an open or percutaneous procedure by first seating a drill tube and then drilling and tapping the hole as needed.
Alternatives: Other robotic systems include the ROSA robot by Medtech, the ExcelsiusGPS robot by Globus Medical, and the SurgiBot and ALF-X Surgical Robotic systems (both from TransEnterix). The Da Vinci Surgical System (Intuitive Surgical) has been utilized for laparoscopic anterior lumbar interbody fusion (ALIF), but it has not been approved by the U.S. Food and Drug Administration for actual spinal instrumentation. Alternative surgical techniques for pedicle screw placement include the freehand fluoroscopy-guided technique and intraoperative image-assisted computer navigation techniques, including isocentric C-arm (Iso-C) 3D (3-dimensional) navigation (Siemens), computed tomography (CT) navigation, O-arm navigation (Medtronic), CT-magnetic resonance imaging co-registration technology, and a 3D-visual guidance technique6-8.
Rationale: The robotic-guided pedicle screw placement offers the following benefits over conventional dorsal instrumentation techniques: improved accuracy and safety in pedicle screw insertion2-4,9-13; precision in screw size selection and planned screw positioning2; a reduction in exposure to radiation for the surgeon, the patient, and the operating-room staff9,11,12,14-19; simplicity and user-friendliness with a moderate learning curve10,11,20,21; ease of registration and reduction of operating time2; significant enhancement of the surgeon's ergonomics and dexterity for repetitive tasks in pedicle screw placement15,22-24; and a wider coverage in function to include utilization during minimally invasive surgery where applicable11,25.
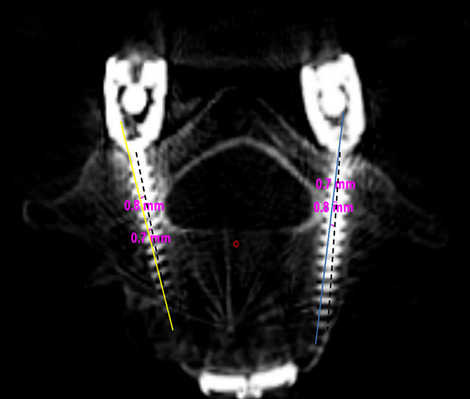
Expected outcomes: Accuracy rates between 94.5% and 99%, comparable with those in our study10, have been reported with the robotic-guided pedicle screw insertion technique, even in studies involving complex deformities and revision surgeries for congenital malformations, degenerative disorders, destructive tumors, and trauma2-4,9-13. The safety of this technique, in terms of reduced complications and intraoperative radiation exposure, has also been documented as higher than that for freehand fluoroscopic guidance or other navigation techniques9,11,12,14-19. The feasibility of this procedure has been further extended to minimally invasive procedures and to use in the cervical region, with replication of its advantages. It is associated with a reasonable learning curve, with consistent successful results after 25 to 30 patients.
Important tips: The principles of robotic-guided pedicle screw placement are similar irrespective of the system used.Although initially utilized mainly for thoracolumbar pedicle screw insertion, the latest robots and software have been adapted for use in the cervical spine with equivalent efficiency and accuracy.Robotic guidance can be employed in non-pedicle-screw-insertion procedures.Challenges include radiation exposure, trajectory failure, equipment and software failure, failed registration, logistics, time, and high cost.
Copyright © 2020 by The Journal of Bone and Joint Surgery, Incorporated.
Figures









References
-
- Hu X, Lieberman IH. Robotic-assisted spine surgery. In: Phillips FM, Lieberman IH, Polly DW, Jr, editors. Minimally invasive spine surgery: surgical techniques and disease management. New York: Springer; 2014. p 61-6.
-
- Lieberman IH, Togawa D, Kayanja MM, Reinhardt MK, Friedlander A, Knoller N, Benzel EC. Bone-mounted miniature robotic guidance for pedicle screw and translaminar facet screw placement: part I—technical development and a test case result. Neurosurgery. 2006. September;59(3):641-50; discussion 641-50. - PubMed
-
- Devito DP, Kaplan L, Dietl R, Pfeiffer M, Horne D, Silberstein B, Hardenbrook M, Kiriyanthan G, Barzilay Y, Bruskin A, Sackerer D, Alexandrovsky V, Stüer C, Burger R, Maeurer J, Donald GD, Schoenmayr R, Friedlander A, Knoller N, Schmieder K, Pechlivanis I, Kim IS, Meyer B, Shoham M. Clinical acceptance and accuracy assessment of spinal implants guided with SpineAssist surgical robot: retrospective study. Spine. 2010. November 15;35(24):2109-15. - PubMed
-
- Pechlivanis I, Kiriyanthan G, Engelhardt M, Scholz M, Lücke S, Harders A, Schmieder K. Percutaneous placement of pedicle screws in the lumbar spine using a bone mounted miniature robotic system: first experiences and accuracy of screw placement. Spine. 2009. February 15;34(4):392-8. - PubMed
-
- Togawa D, Kayanja MM, Reinhardt MK, Shoham M, Balter A, Friedlander A, Knoller N, Benzel EC, Lieberman IH. Bone-mounted miniature robotic guidance for pedicle screw and translaminar facet screw placement: part 2—evaluation of system accuracy. Neurosurgery. 2007. February;60(2)(Suppl 1):ONS129-39; discussion ONS139. - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources