

Landing mosquitoes bounce when engaging a substrate
- PMID: 32978447
- PMCID: PMC7519040
- DOI: 10.1038/s41598-020-72462-0
Landing mosquitoes bounce when engaging a substrate
Abstract
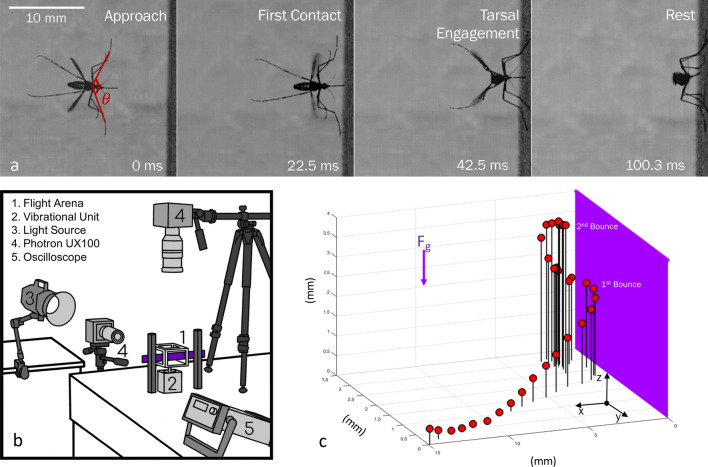
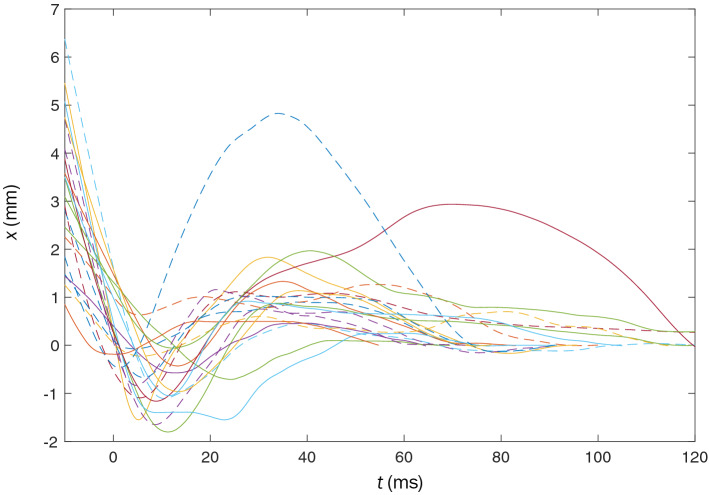
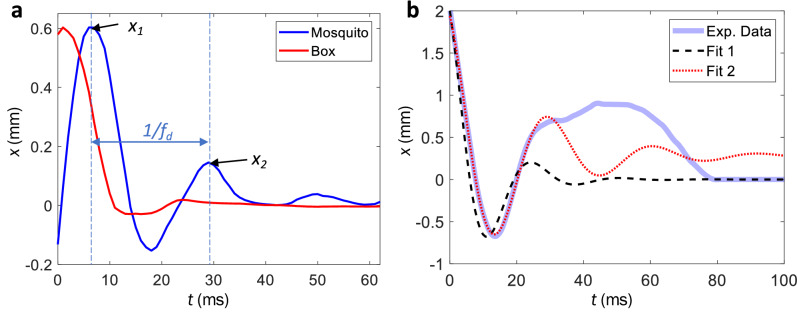
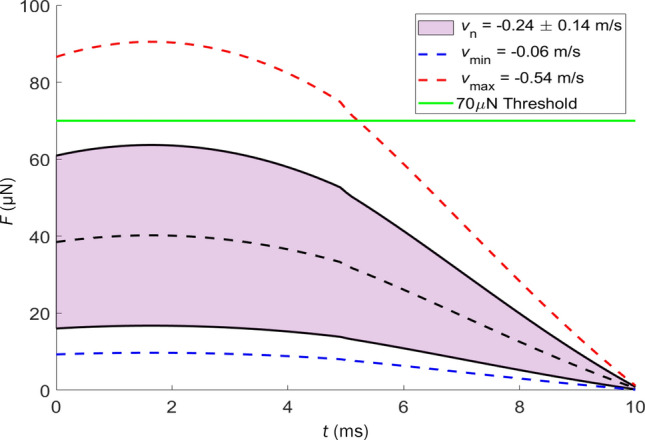
In this experimental study we film the landings of Aedes aegypti mosquitoes to characterize landing behaviors and kinetics, limitations, and the passive physiological mechanics they employ to land on a vertical surface. A typical landing involves 1-2 bounces, reducing inbound momentum by more than half before the mosquito firmly attaches to a surface. Mosquitoes initially approach landing surfaces at 0.1-0.6 m/s, decelerating to zero velocity in approximately 5 ms at accelerations as high as 5.5 gravities. Unlike Dipteran relatives, mosquitoes do not visibly prepare for landing with leg adjustments or body pitching. Instead mosquitoes rely on damping by deforming two forelimbs and buckling of the proboscis, which also serves to distribute the impact force, lessening the potential of detection by a mammalian host. The rebound response of a landing mosquito is well-characterized by a passive mass-spring-damper model which permits the calculation of force across impact velocity. The landing force of the average mosquito in our study is approximately 40 [Formula: see text]N corresponding to an impact velocity of 0.24 m/s. The substrate contact velocity which produces a force perceptible to humans, 0.42 m/s, is above 85% of experimentally observed landing speeds.
Conflict of interest statement
The authors declare no competing interests.
Figures


References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
