

Exploring the Contribution of Proprioceptive Reflexes to Balance Control in Perturbed Standing
- PMID: 32984265
- PMCID: PMC7485384
- DOI: 10.3389/fbioe.2020.00866
Exploring the Contribution of Proprioceptive Reflexes to Balance Control in Perturbed Standing
Abstract
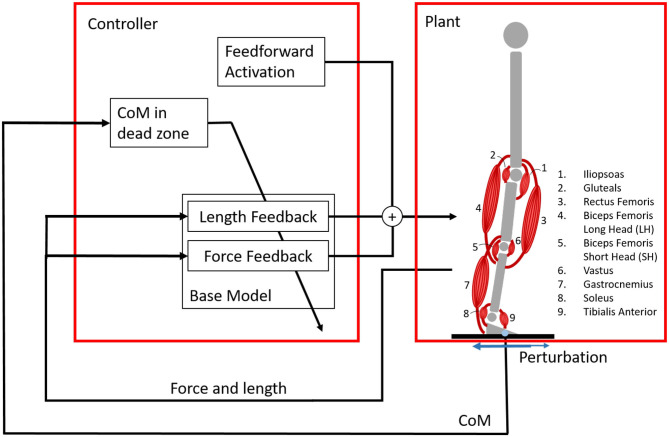
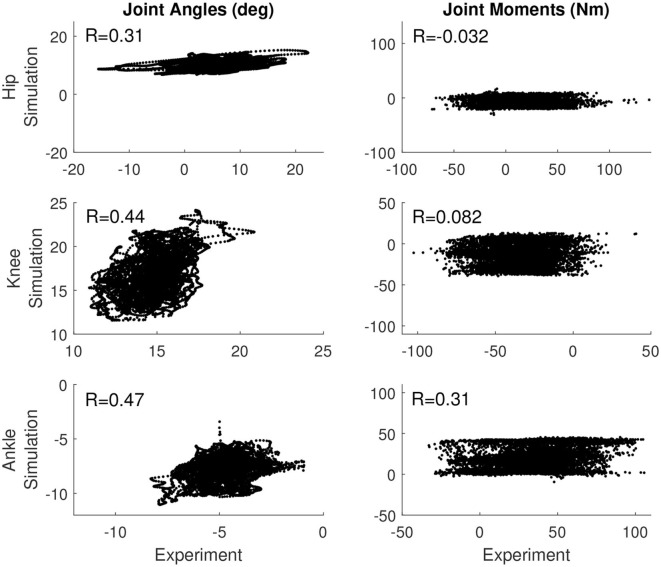
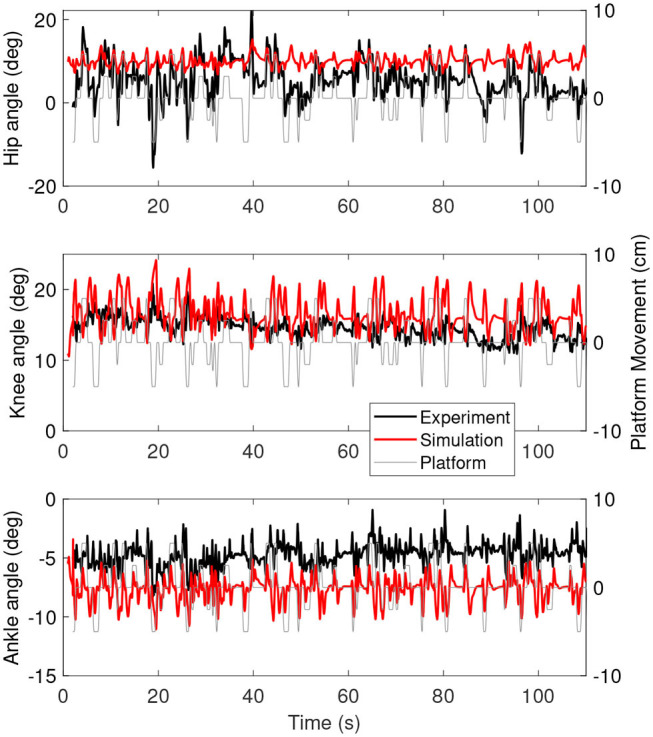
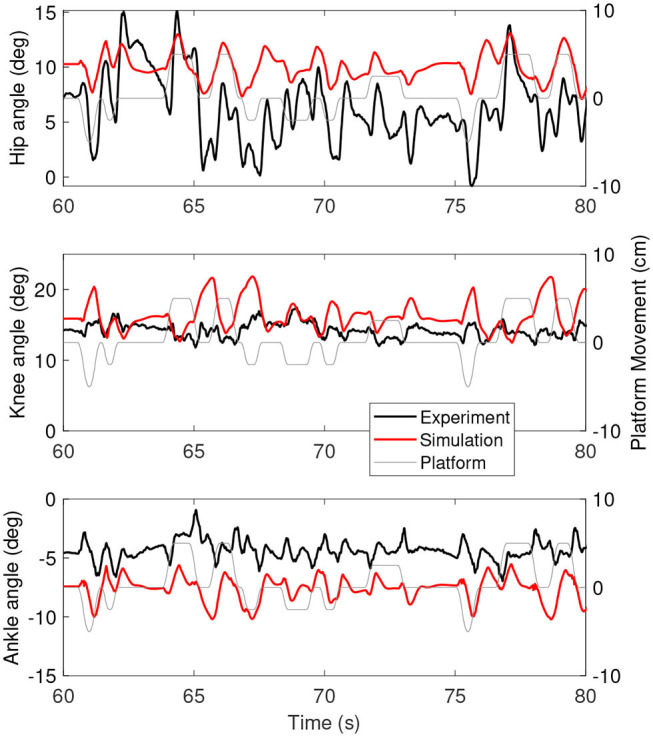
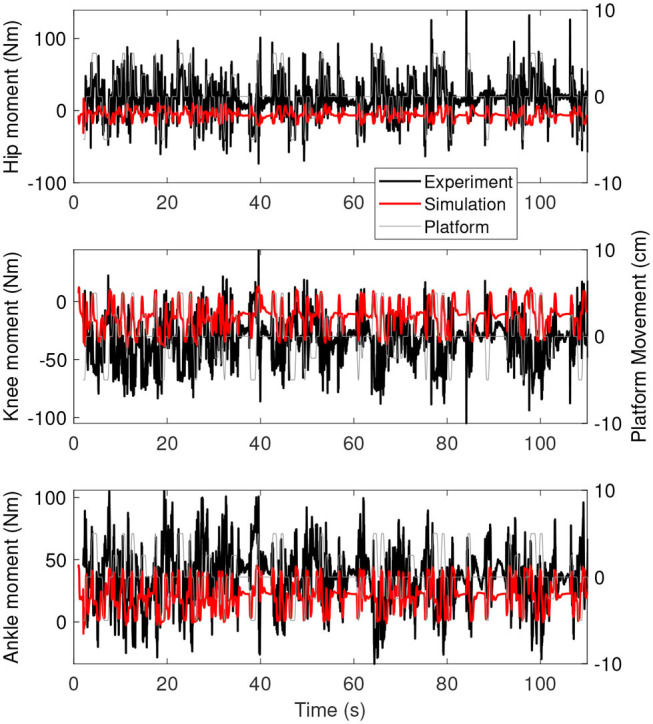
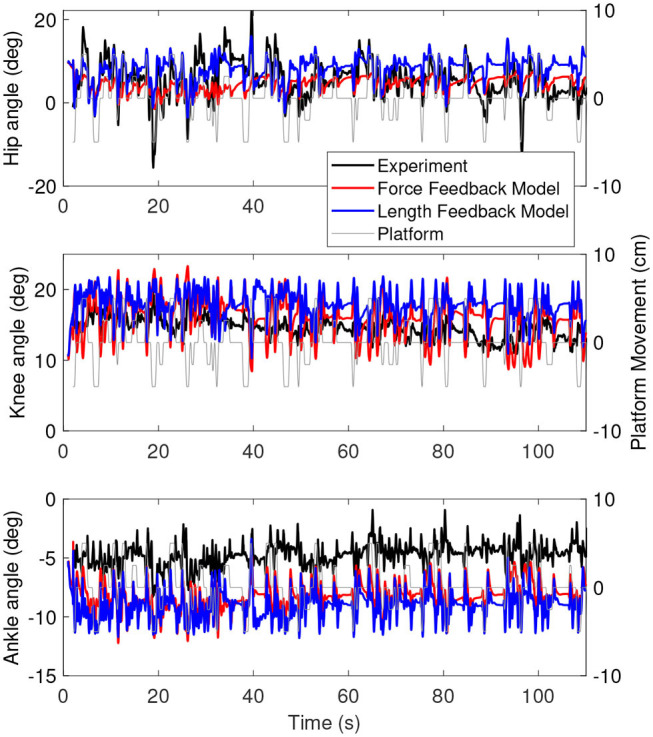
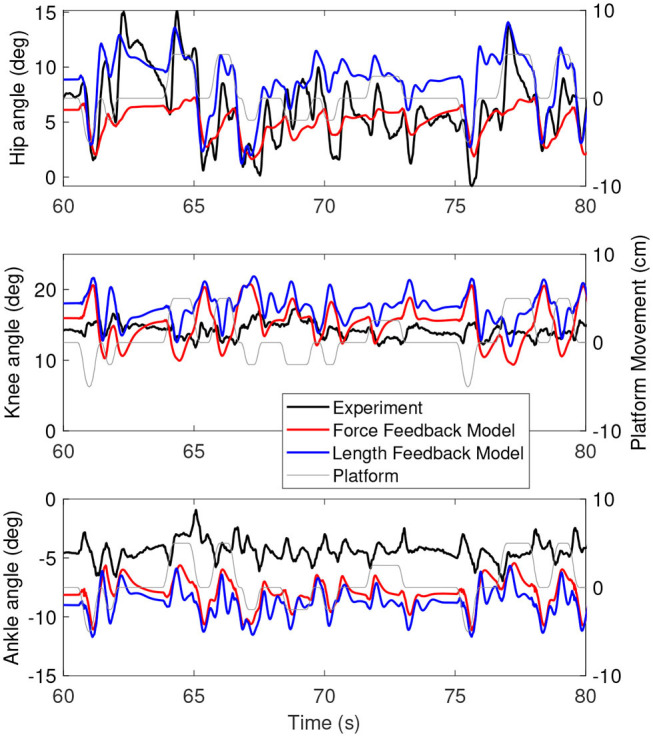
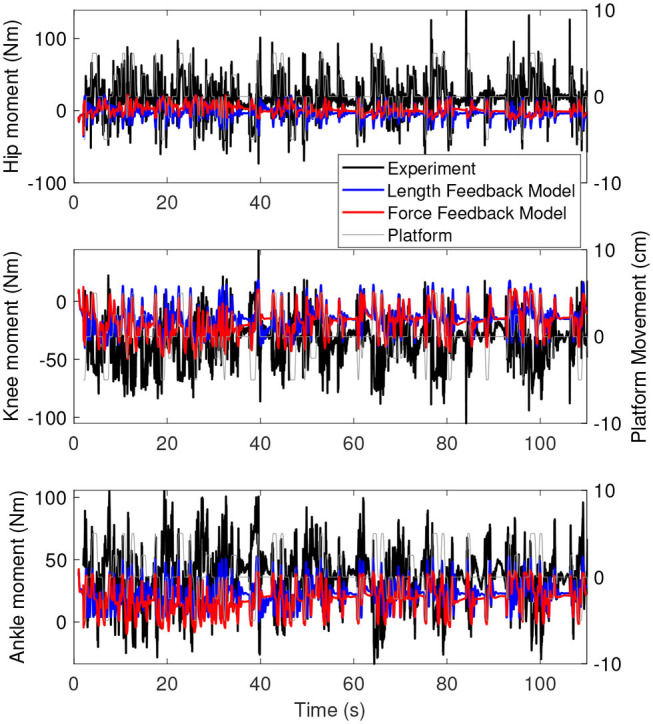
Humans control balance using different feedback loops involving the vestibular system, the visual system, and proprioception. In this article, we focus on proprioception and explore the contribution of reflexes based on force and length feedback to standing balance. In particular, we address the questions of how much proprioception alone could explain balance control, and whether one modality, force or length feedback, is more important than the other. A sagittal plane neuro-musculoskeletal model was developed with six degrees of freedom and nine muscles in each leg. A controller was designed using proprioceptive reflexes and a dead zone. No feedback control was applied inside the dead zone. Reflexes were active once the center of mass moved outside the dead zone. Controller parameters were found by solving an optimization problem, where effort was minimized while the neuro-musculoskeletal model should remain standing upright on a perturbed platform. The ground was perturbed with random square pulses in the sagittal plane with different amplitudes and durations. The optimization was solved for three controllers: using force and length feedback (base model), using only force feedback, and using only length feedback. Simulations were compared to human data from previous work, where an experiment with the same perturbation signal was performed. The optimized controller yielded a similar posture, since average joint angles were within 5 degrees of the experimental average joint angles. The joint angles of the base model, the length only model, and the force only model correlated weakly (ankle) to moderately with the experimental joint angles. The ankle moment correlated weakly to moderately with the experimental ankle moment, while the hip and knee moment were only weakly correlated, or not at all. The time series of the joint angles showed that the length feedback model was better able to explain the experimental joint angles than the force feedback model. Changes in time delay affected the correlation of the joint angles and joint moments. The objective of effort minimization yielded lower joint moments than in the experiment, suggesting that other objectives are also important in balance control, which cause an increase in effort and thus larger joint moments.
Keywords: balance control; neuromusculoskeletal simulation; perturbed standing; proprioception; reflexes.
Copyright © 2020 Koelewijn and Ijspeert.
Figures
Similar articles
-
Human standing posture control system depending on adopted strategies.Med Biol Eng Comput. 2005 Jan;43(1):107-14. doi: 10.1007/BF02345130. Med Biol Eng Comput. 2005. PMID: 15742727
-
Is lower leg proprioception essential for triggering human automatic postural responses?Exp Brain Res. 2000 Feb;130(3):375-91. doi: 10.1007/s002219900259. Exp Brain Res. 2000. PMID: 10706436
-
Ankle muscle responses during perturbed walking with blocked ankle joints.J Neurophysiol. 2019 May 1;121(5):1711-1717. doi: 10.1152/jn.00752.2018. Epub 2019 Mar 13. J Neurophysiol. 2019. PMID: 30864874
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
-
Proprioception of the ankle and knee.Sports Med. 1998 Mar;25(3):149-55. doi: 10.2165/00007256-199825030-00002. Sports Med. 1998. PMID: 9554026 Review.
Cited by
-
Bridging the sim2real gap. Investigating deviations between experimental motion measurements and musculoskeletal simulation results-a systematic review.Front Bioeng Biotechnol. 2024 Jun 11;12:1386874. doi: 10.3389/fbioe.2024.1386874. eCollection 2024. Front Bioeng Biotechnol. 2024. PMID: 38919383 Free PMC article.
-
Mechanism-Driven Strategies for Reducing Fall Risk in the Elderly: A Multidisciplinary Review of Exercise Interventions.Healthcare (Basel). 2024 Nov 29;12(23):2394. doi: 10.3390/healthcare12232394. Healthcare (Basel). 2024. PMID: 39685016 Free PMC article. Review.
-
Humans self-organise balance control strategies on a dynamic platform.Sci Rep. 2025 Jul 8;15(1):24366. doi: 10.1038/s41598-025-09127-3. Sci Rep. 2025. PMID: 40628838 Free PMC article.
-
Regulation of static and dynamic balance in healthy young adults: interactions between stance width and visual conditions.Front Bioeng Biotechnol. 2025 Jan 28;13:1538286. doi: 10.3389/fbioe.2025.1538286. eCollection 2025. Front Bioeng Biotechnol. 2025. PMID: 39935603 Free PMC article.
-
An approximate stochastic optimal control framework to simulate nonlinear neuro-musculoskeletal models in the presence of noise.PLoS Comput Biol. 2022 Jun 8;18(6):e1009338. doi: 10.1371/journal.pcbi.1009338. eCollection 2022 Jun. PLoS Comput Biol. 2022. PMID: 35675227 Free PMC article.
References
LinkOut - more resources
Full Text Sources