

Roboticizing fabric by integrating functional fibers
- PMID: 32989123
- PMCID: PMC7568323
- DOI: 10.1073/pnas.2006211117
Roboticizing fabric by integrating functional fibers
Abstract
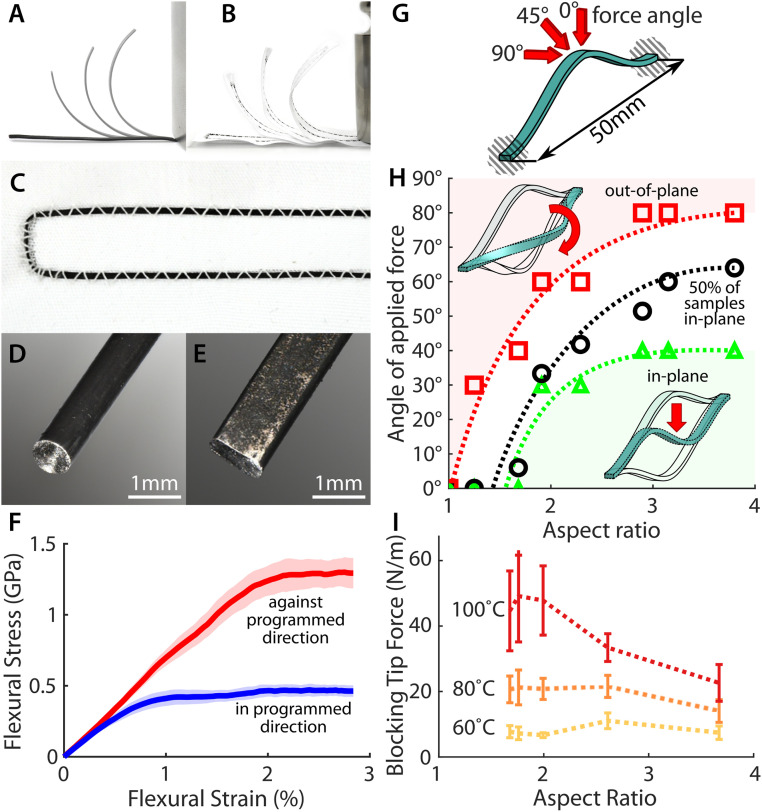
Fabrics are ubiquitous materials that have conventionally been passive assemblies of interlacing, inactive fibers. However, the recent emergence of active fibers with actuation, sensing, and structural capabilities provides the opportunity to impart robotic function into fabric substrates. Here we present an implementation of robotic fabrics by integrating functional fibers into conventional fabrics using typical textile manufacturing techniques. We introduce a set of actuating and variable-stiffness fibers, as well as printable in-fabric sensors, which allows for robotic closed-loop control of everyday fabrics while remaining lightweight and maintaining breathability. Finally, we demonstrate the utility of robotic fabrics through their application to an active wearable tourniquet, a transforming and load-bearing deployable structure, and an untethered, self-stowing airfoil.
Keywords: active fibers; e-textiles; functional fibers; robotic fabric; smart textiles.
Conflict of interest statement
The authors declare no competing interest.
Figures




References
-
- Coyle S. et al. ., Smart nanotextiles: A review of materials and applications. MRS Bull. 32, 434–442 (2007).
-
- Cheng J. et al. ., “Textile building blocks: Toward simple, modularized, and standardized smart textile” in Smart Textiles, Schneegass S., Amft O., Eds. (Human–Computer Interaction Series, Springer, Cham, Switzerland, 2017), pp. 303–331.
-
- Paik J. K., Kramer R. K., Wood R. J., “Stretchable circuits and sensors for robotic origami” in 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, (IEEE, 2011), pp. 414–420.
-
- Kim R. et al. ., Waterproof AlInGaP optoelectronics on stretchable substrates with applications in biomedicine and robotics. Nature Mater. London 9, 929–937 (2010). - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
