

Impact of Using GPS L2 Receiver Antenna Corrections for the Galileo E5a Frequency on Position Estimates
- PMID: 32992572
- PMCID: PMC7583895
- DOI: 10.3390/s20195536
Impact of Using GPS L2 Receiver Antenna Corrections for the Galileo E5a Frequency on Position Estimates
Abstract
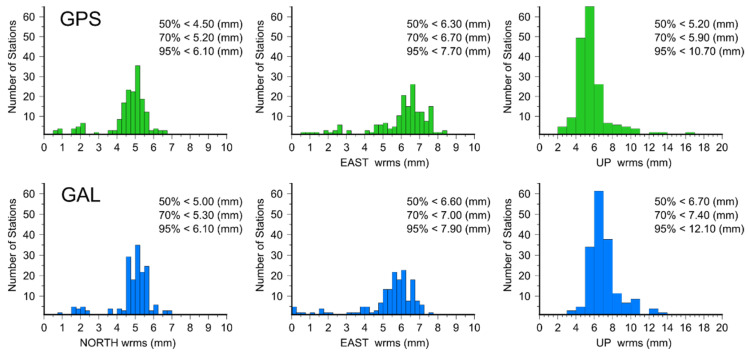
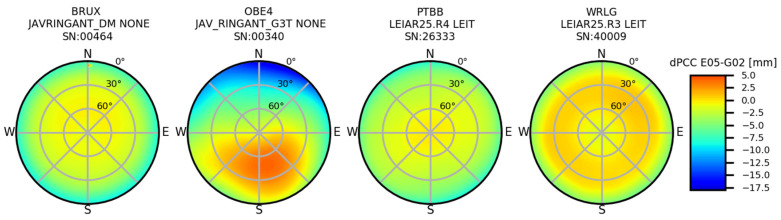
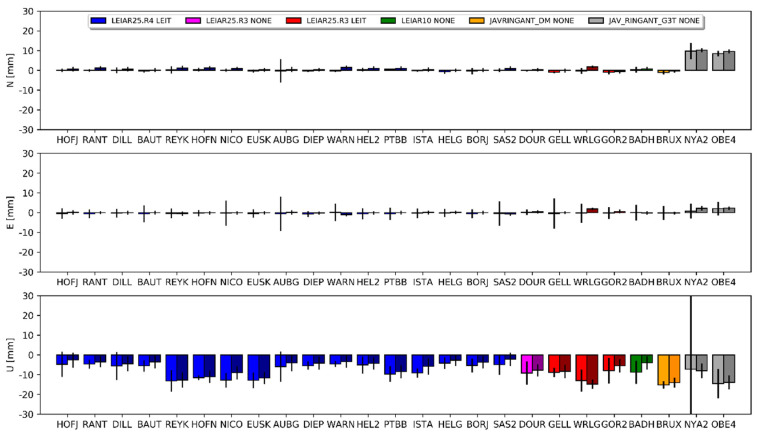
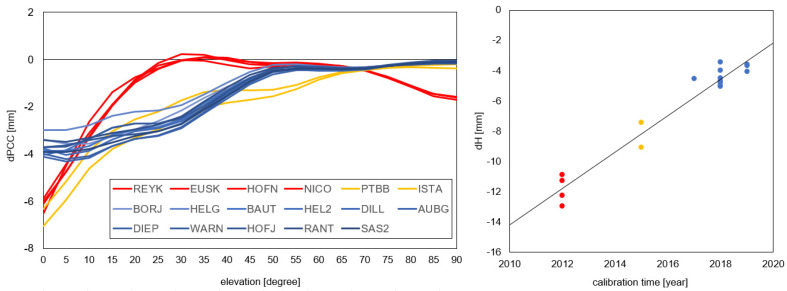
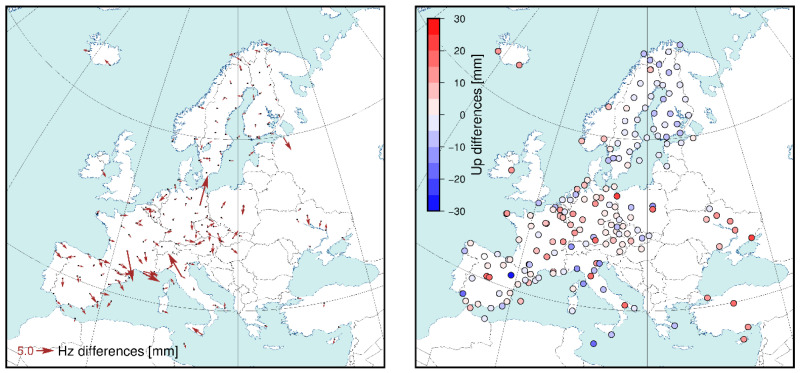
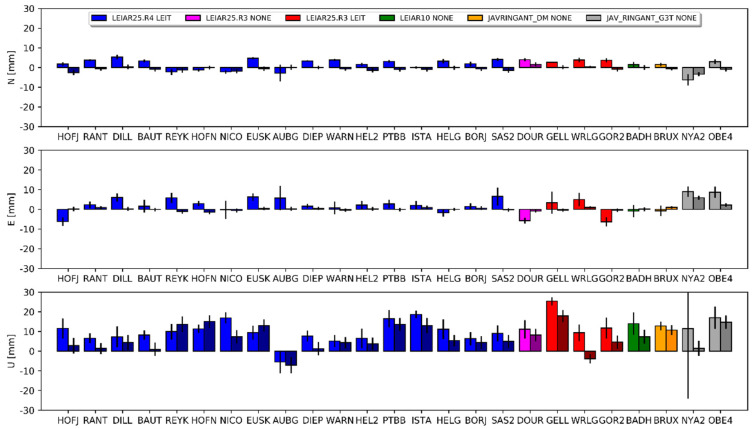
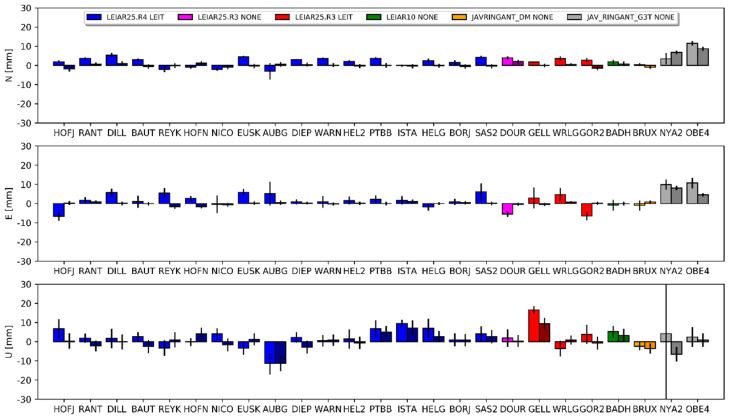
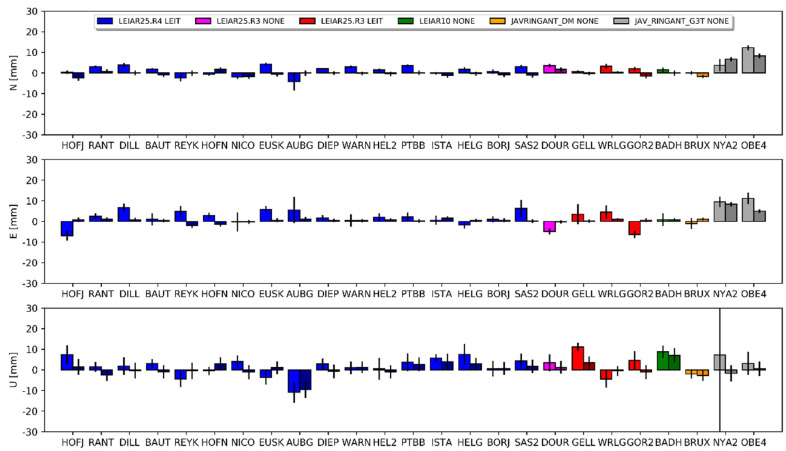
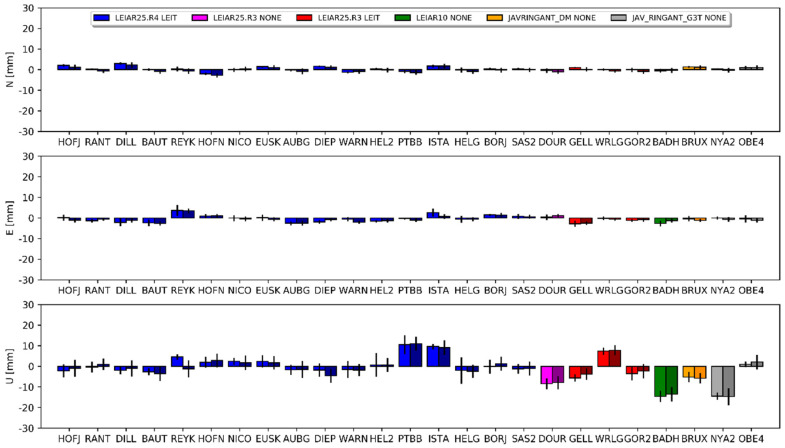
Knowledge of Global Navigation Satellite System (GNSS) antenna phase center variations plays a key role in precise positioning. Proper modeling is achieved by accessing antenna phase center corrections, which are determined in the calibration process. For most receiver antenna types, the International GNSS Service provides such corrections for two GPS and GLONASS carrier signals. In the case of Galileo, access to phase center corrections is difficult; only antennas calibrated in the anechoic chambers have available corrections for Galileo frequencies. Hence, in many of the studies, GPS-dedicated corrections are used for these Galileo frequencies. Differential analysis was conducted in this study to evaluate the impact of such change. In total, 25 stations belonging to the EUREF Permanent Network and equipped with individual calibrated antennas were the subject of this research. The results for both the absolute and relative positioning methods are clear: using GPS L2 corrections for Galileo E5a frequency causes a bias in the estimated height of almost 8 mm. For the horizontal component, a significant difference can be noticed for only one type of antenna.
Keywords: Galileo frequency; coordinates; phase center variations; receiver antenna calibrations.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

References
-
- Kiliszek D., Kroszczynski K. Performance of the Precise Point Positioning method along with the development of GPS, GLONASS and Galileo systems. Measurement. 2020;164:108009. doi: 10.1016/j.measurement.2020.108009. - DOI
-
- Steigenberger P., Montenbruck O. Galileo status: Orbits, clocks, and positioning. GPS Solut. 2017;21:319–331. doi: 10.1007/s10291-016-0566-5. - DOI
-
- Montenbruck O., Steigenberger P., Prange L., Deng Z., Zhao Q., Perosanz F., Romero I., Noll C., Stürze A., Weber G., et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—achievements, prospects and challenges. Adv. Space Res. 2017;59:1671–1697. doi: 10.1016/j.asr.2017.01.011. - DOI
-
- Li X., Zhu Y., Zheng K., Yuan Y., Liu G., Xiong Y. Precise Orbit and Clock Products of Galileo, BDS and QZSS from MGEX Since 2018: Comparison and PPP Validation. Remote Sens. 2020;12:1415. doi: 10.3390/rs12091415. - DOI
-
- Prange L., Orliac E., Dach R., Arnold D., Beutler G., Schaer S., Jaggi A. CODE’s five-system orbit and clock solution—the challenges of multi-GNSS data analysis. J. Geod. 2017;91:345–360. doi: 10.1007/s00190-016-0968-8. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
