

A Sensor Fusion Approach to the Estimation of Instantaneous Velocity Using Single Wearable Sensor During Sprint
- PMID: 33014992
- PMCID: PMC7461787
- DOI: 10.3389/fbioe.2020.00838
A Sensor Fusion Approach to the Estimation of Instantaneous Velocity Using Single Wearable Sensor During Sprint
Abstract
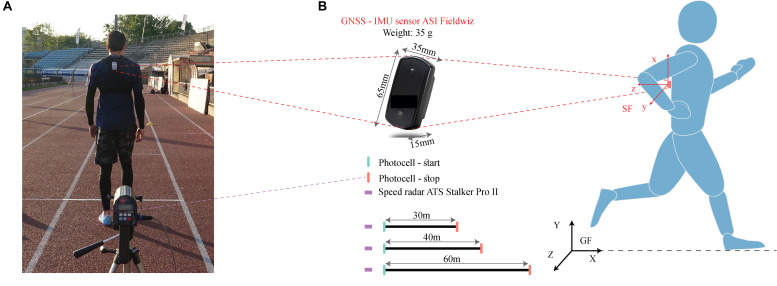
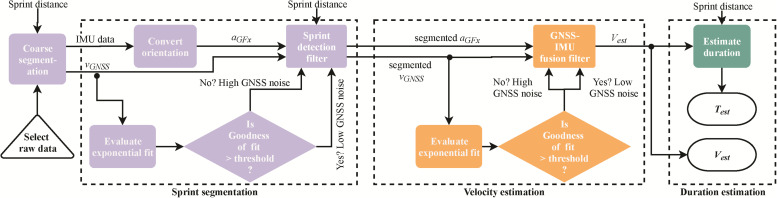
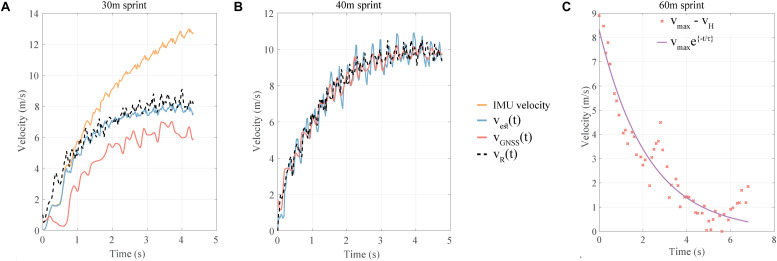
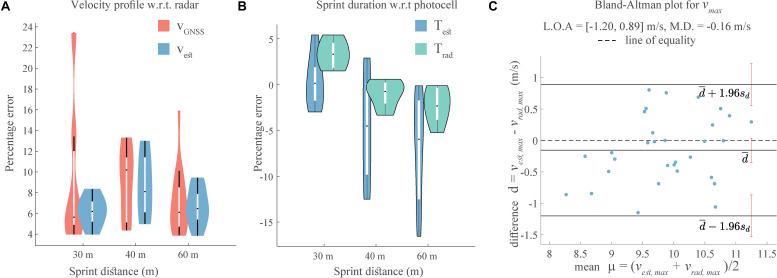
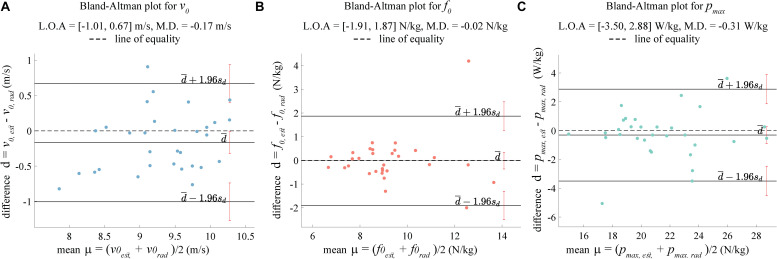
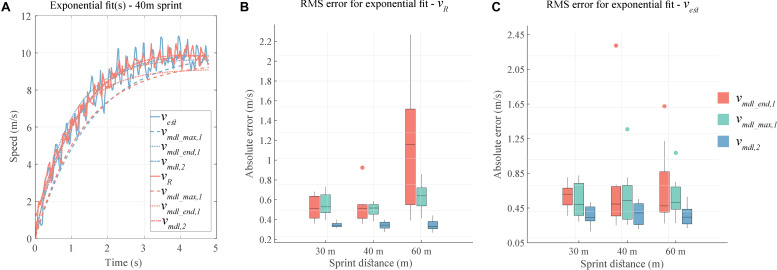
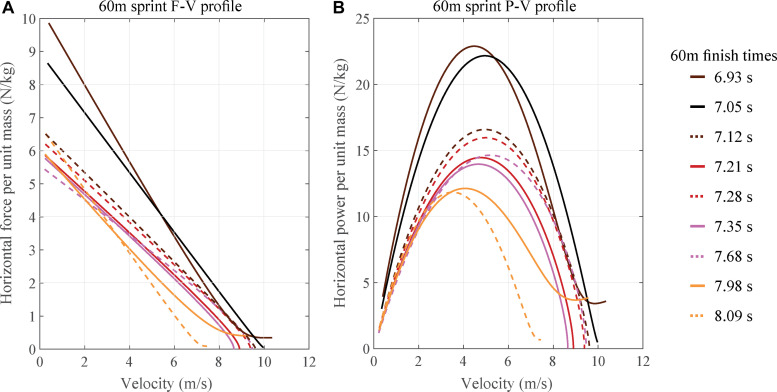
Power-Force-Velocity profile obtained during a sprint test is crucial for designing personalized training and evaluating injury risks. Estimation of instantaneous velocity is requisite for developing these profiles and the predominant method for this estimation assumes it to have a first order exponential behavior. While this method remains appropriate for maximal sprints, the sprint velocity profile may not always show a first-order exponential behavior. Alternately, velocity profile has been estimated using inertial sensors, with a speed radar, or a smartphone application. Existing methods either relied on the exponential behavior or timing gates for drift removal, or estimated only the mean velocity. Thus, there is a need for a more flexible and appropriate approach, allowing for instantaneous velocity estimation during sprint tests. The proposed method aims to solve this problem using a sensor fusion approach, by combining the signals from wearable Global Navigation Satellite System (GNSS) and inertial measurement unit (IMU) sensors. We collected data from nine elite sprinters, equipped with a wearable GNSS-IMU sensor, who ran two trials each of 60 and 30/40 m sprints. We developed an algorithm using a gradient descent-based orientation filter, which simplified our model to a linear one-dimensional model, thus allowing us to use a simple Kalman filter (KF) for velocity estimation. We used two cascaded KFs, to segment the sprint data precisely, and to estimate the velocity and the sprint duration, respectively. We validated the estimated velocity and duration with speed radar and photocell data as reference. The median RMS error for the estimated velocity ranged from 6 to 8%, while that for the estimated sprint duration lied between 0.1 and -6.0%. The Bland-Altman plot showed close agreement between the estimated and the reference values of maximum velocity. Examination of fitting errors indicated a second order exponential behavior for the sprint velocity profile, unlike the first order behavior previously suggested in literature. The proposed sensor-fusion algorithm is valid to compute an accurate velocity profile with respect to the radar; it can compensate for and improve upon the accuracy of the individual IMU and GNSS velocities. This method thus enables the use of wearable sensors in the analysis of sprint test.
Keywords: athlete monitoring; functional capacity test; sensor fusion; sprinting; validation study; velocity profile; wearable GNSS-IMU sensor.
Copyright © 2020 Apte, Meyer, Gremeaux, Dadashi and Aminian.
Figures
References
-
- Altman D. G. (1990). Practical statistics for medical research. Boca Raton, FL: CRC press.
-
- Bangsbo J., Krustrup P. (2001). Physiological demands in top-class soccer refereeing: effect of high intensity intermittent training. Med. Sci. Sports Exerc. 33:S159. - PubMed
-
- Brodie M., Walmsley A., Page W. (2008). Fusion motion capture: a prototype system using inertial measurement units and GPS for the biomechanical analysis of ski racing. Sports Technol. 1 17–28. 10.1080/19346182.2008.9648447 - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous