

Real-Time Fruit Recognition and Grasping Estimation for Robotic Apple Harvesting
- PMID: 33020430
- PMCID: PMC7583839
- DOI: 10.3390/s20195670
Real-Time Fruit Recognition and Grasping Estimation for Robotic Apple Harvesting
Abstract
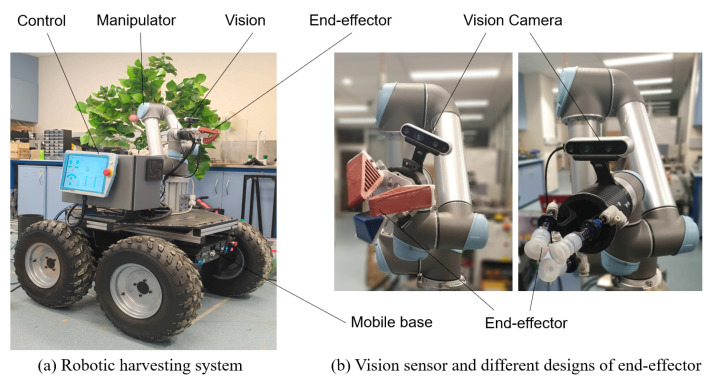
Robotic harvesting shows a promising aspect in future development of agricultural industry. However, there are many challenges which are still presented in the development of a fully functional robotic harvesting system. Vision is one of the most important keys among these challenges. Traditional vision methods always suffer from defects in accuracy, robustness, and efficiency in real implementation environments. In this work, a fully deep learning-based vision method for autonomous apple harvesting is developed and evaluated. The developed method includes a light-weight one-stage detection and segmentation network for fruit recognition and a PointNet to process the point clouds and estimate a proper approach pose for each fruit before grasping. Fruit recognition network takes raw inputs from RGB-D camera and performs fruit detection and instance segmentation on RGB images. The PointNet grasping network combines depth information and results from the fruit recognition as input and outputs the approach pose of each fruit for robotic arm execution. The developed vision method is evaluated on RGB-D image data which are collected from both laboratory and orchard environments. Robotic harvesting experiments in both indoor and outdoor conditions are also included to validate the performance of the developed harvesting system. Experimental results show that the developed vision method can perform highly efficient and accurate to guide robotic harvesting. Overall, the developed robotic harvesting system achieves 0.8 on harvesting success rate and cycle time is 6.5 seconds.
Keywords: agricultural robot; autonomous harvesting; deep learning; grasping estimation; pointNet; robotic harvesting.
Conflict of interest statement
The authors declare no conflict of interest.
Figures










References
-
- Vasconez J.P., Kantor G.A., Cheein F.A.A. Human–robot interaction in agriculture: A survey and current challenges. Biosyst. Eng. 2019;179:35–48. doi: 10.1016/j.biosystemseng.2018.12.005. - DOI
-
- Bac C.W., van Henten E.J., Hemming J., Edan Y. Harvesting robots for high-value crops: State-of-the-art review and challenges ahead. J. Field Robot. 2014;31:888–911. doi: 10.1002/rob.21525. - DOI
-
- Zhao Y., Gong L., Huang Y., Liu C. A review of key techniques of vision-based control for harvesting robot. Comput. Electron. Agric. 2016;127:311–323.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
