

Design and clinical implementation of an open-source bionic leg
- PMID: 33020601
- PMCID: PMC7581510
- DOI: 10.1038/s41551-020-00619-3
Design and clinical implementation of an open-source bionic leg
Abstract
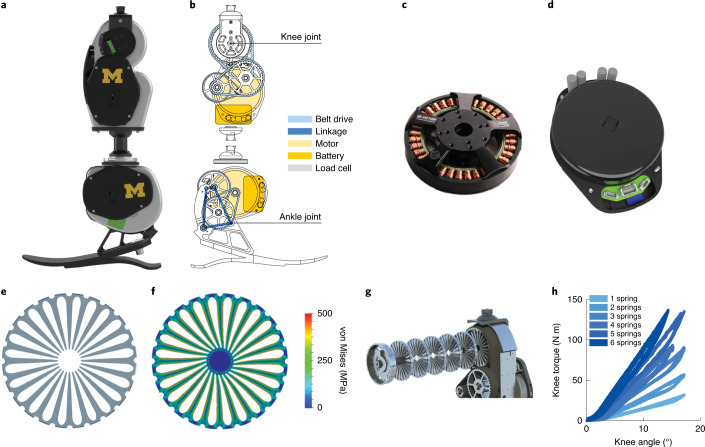
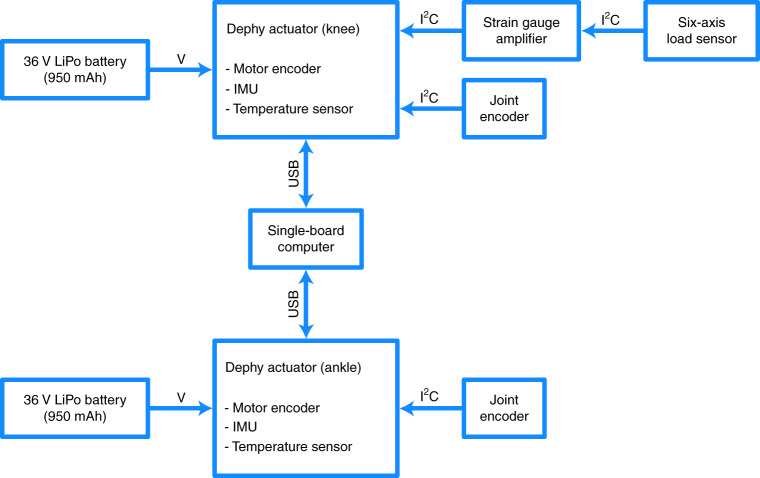
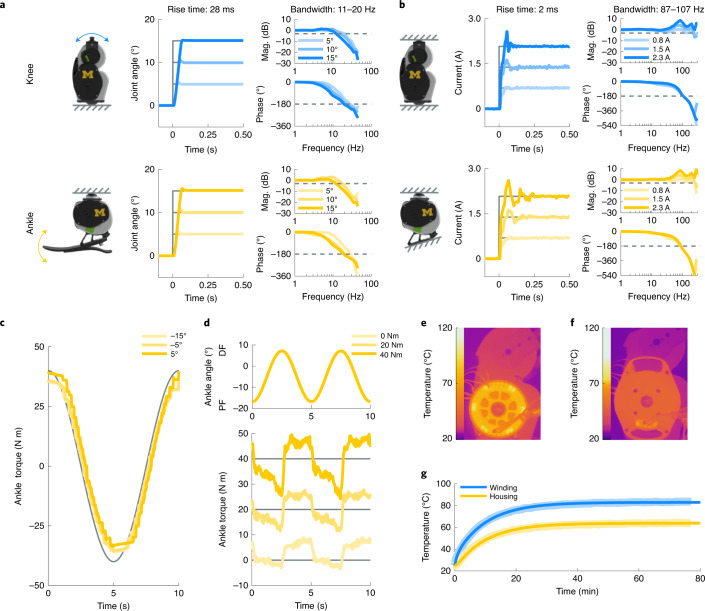
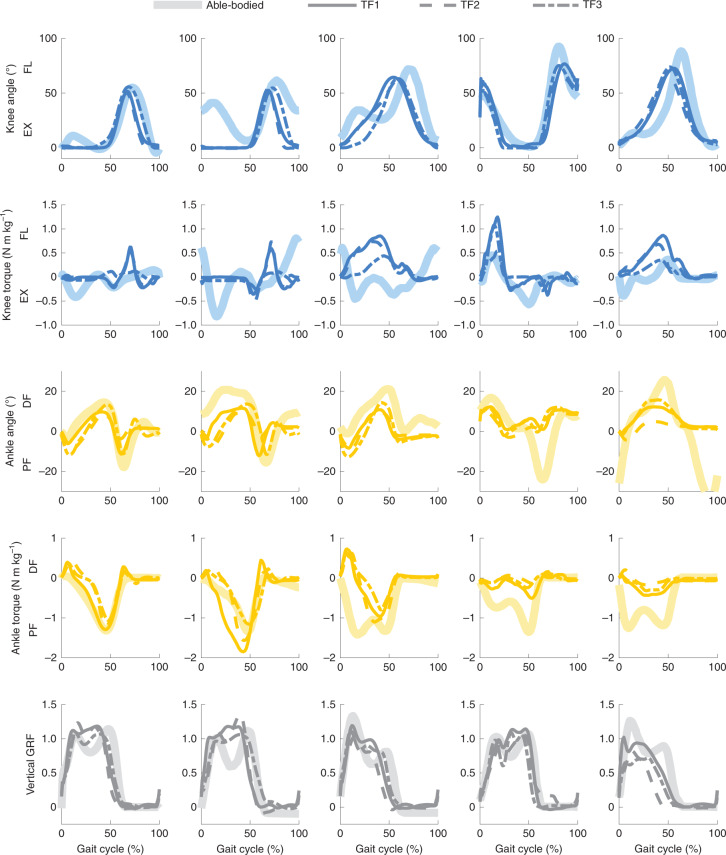
In individuals with lower-limb amputations, robotic prostheses can increase walking speed, and reduce energy use, the incidence of falls and the development of secondary complications. However, safe and reliable prosthetic-limb control strategies for robust ambulation in real-world settings remain out of reach, partly because control strategies have been tested with different robotic hardware in constrained laboratory settings. Here, we report the design and clinical implementation of an integrated robotic knee-ankle prosthesis that facilitates the real-world testing of its biomechanics and control strategies. The bionic leg is open source, it includes software for low-level control and for communication with control systems, and its hardware design is customizable, enabling reduction in its mass and cost, improvement in its ease of use and independent operation of the knee and ankle joints. We characterized the electromechanical and thermal performance of the bionic leg in benchtop testing, as well as its kinematics and kinetics in three individuals during walking on level ground, ramps and stairs. The open-source integrated-hardware solution and benchmark data that we provide should help with research and clinical testing of knee-ankle prostheses in real-world environments.
Conflict of interest statement
L.M.M. and J.-F.D. are cofounders of Dephy Inc., which supports the open-source Flexible Scalable Electronics Architecture, as well as its proprietary, commercial derivatives.
Figures

References
-
- Ziegler-Graham K, MacKenzie EJ, Ephraim PL, Travison TG, Brookmeyer R. Estimating the prevalence of limb loss in the United States: 2005 to 2050. Arch. Phys. Med. Rehabil. 2008;89:422–429. - PubMed
-
- Sinha R, Van Den Heuvel WJA, Arokiasamy P. Factors affecting quality of life in lower limb amputees. Prosthet. Orthot. Int. 2011;35:90–96. - PubMed
-
- Waters RL, Perry J, Antonelli D, Hislop H. Energy cost of walking of amputees: the influence of level of amputation. J. Bone Joint Surg. Am. 1976;58:42–46. - PubMed
-
- Au SK, Herr HM. Powered ankle-foot prosthesis. IEEE Robot. Autom. Mag. 2008;15:52–59.
-
- Miller WC, Speechley M, Deathe B. The prevalence and risk factors of falling and fear of falling among lower extremity amputees. Arch. Phys. Med. Rehabil. 2001;82:1031–1037. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
