

Functional Fibers and Fabrics for Soft Robotics, Wearables, and Human-Robot Interface
- PMID: 33025662
- PMCID: PMC11468729
- DOI: 10.1002/adma.202002640
Functional Fibers and Fabrics for Soft Robotics, Wearables, and Human-Robot Interface
Abstract
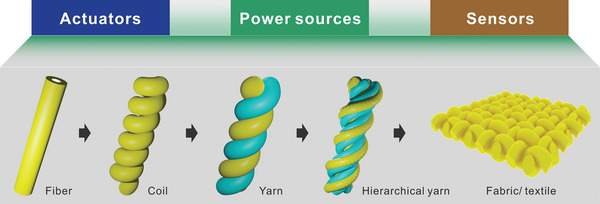
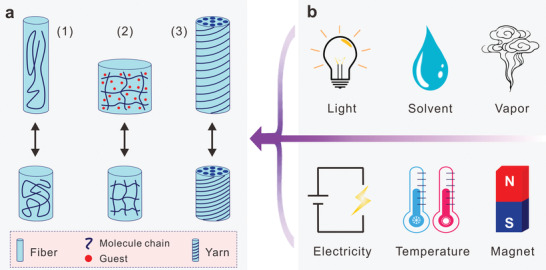
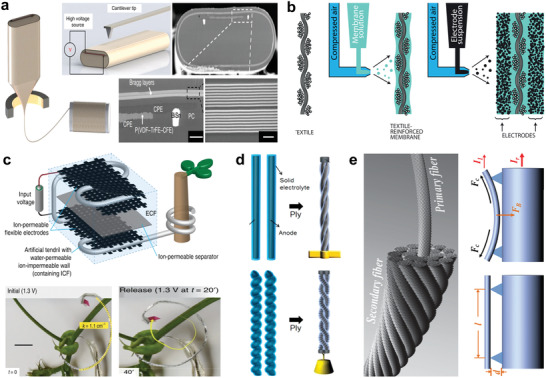
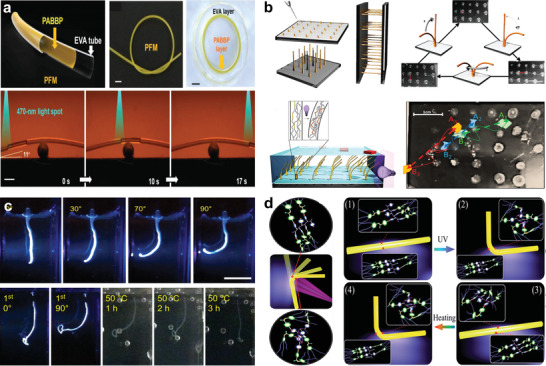
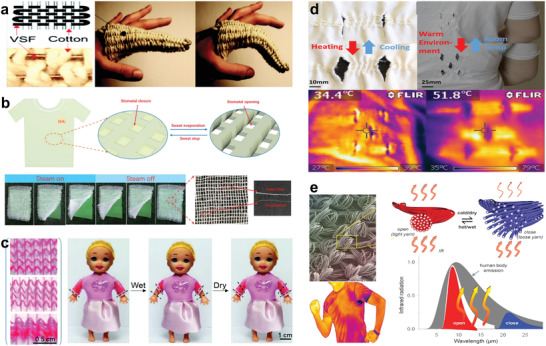
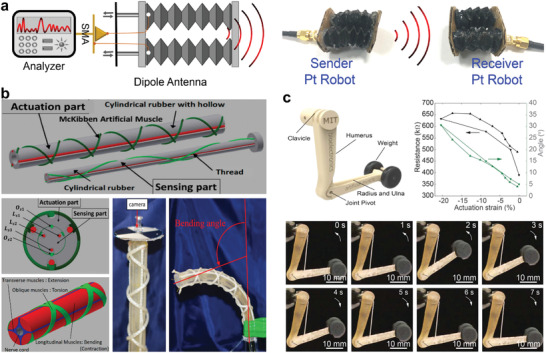
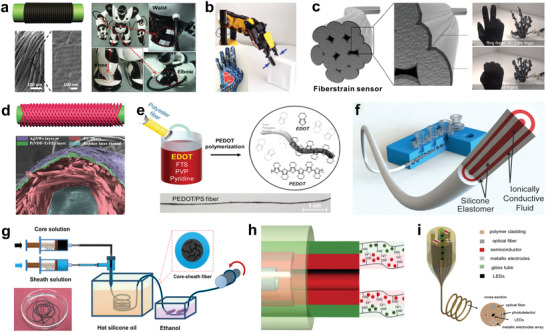
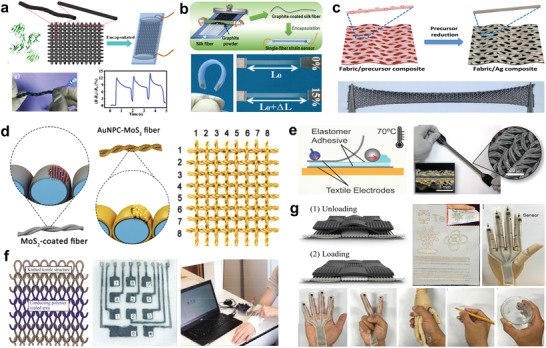
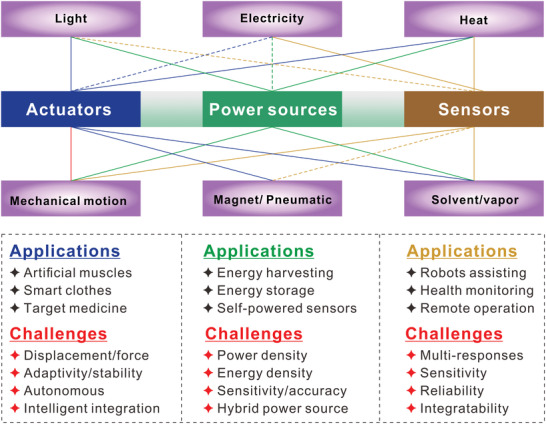
Soft robotics inspired by the movement of living organisms, with excellent adaptability and accuracy for accomplishing tasks, are highly desirable for efficient operations and safe interactions with human. With the emerging wearable electronics, higher tactility and skin affinity are pursued for safe and user-friendly human-robot interactions. Fabrics interlocked by fibers perform traditional static functions such as warming, protection, and fashion. Recently, dynamic fibers and fabrics are favorable to deliver active stimulus responses such as sensing and actuating abilities for soft-robots and wearables. First, the responsive mechanisms of fiber/fabric actuators and their performances under various external stimuli are reviewed. Fiber/yarn-based artificial muscles for soft-robots manipulation and assistance in human motion are discussed, as well as smart clothes for improving human perception. Second, the geometric designs, fabrications, mechanisms, and functions of fibers/fabrics for sensing and energy harvesting from the human body and environments are summarized. Effective integration between the electronic components with garments, human skin, and living organisms is illustrated, presenting multifunctional platforms with self-powered potential for human-robot interactions and biomedicine. Lastly, the relationships between robotic/wearable fibers/fabrics and the external stimuli, together with the challenges and possible routes for revolutionizing the robotic fibers/fabrics and wearables in this new era are proposed.
Keywords: actuators; fibers/fabrics; power sources; sensors; soft robotics.
© 2020 The Authors. Published by Wiley-VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

References
-
- Gries T., Raina M., Quadflieg T., Stolyarov O., Textile Fibre Composites in Civil Engineering, Elsevier, Amsterdam, The Netherlands: 2016, p. 3.
-
- Vigo T. L., Textile Processing and Properties: Preparation, Dyeing, Finishing and Performance, Vol. 11, Elsevier, Amsterdam, The Netherlands: 2013.
-
- Zeng W., Shu L., Li Q., Chen S., Wang F., Tao X. M., Adv. Mater. 2014, 26, 5310. - PubMed
-
- Weng W., Chen P., He S., Sun X., Peng H., Angew. Chem., Int. Ed. 2016, 55, 6140. - PubMed
-
- Jost K., Dion G., Gogotsi Y., J. Mater. Chem. A 2014, 2, 10776.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
