

Optical fiber Fabry-Pérot micro-displacement sensor for MEMS in-plane motion stage
- PMID: 33060873
- PMCID: PMC7552813
Optical fiber Fabry-Pérot micro-displacement sensor for MEMS in-plane motion stage
Abstract
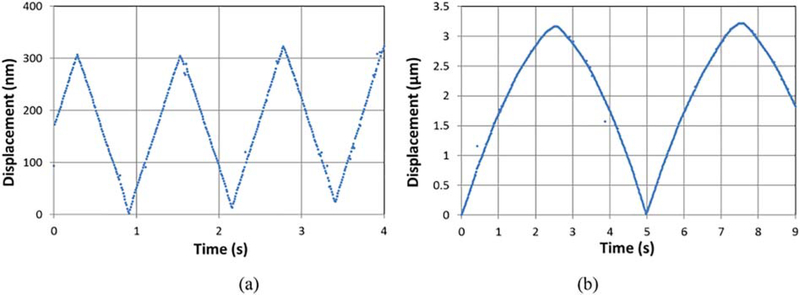
Fabry-Pérot interferometer sensors have been widely used in Micro-Electro-Mechanical-Systems (MEMS) due to high displacement accuracy and immunity to electromagnetic noises, but they are still limited by micro scale measurement range. In this paper, a Fabry-Pérot interferometer in-plane displacement sensor is proposed for measuring the displacement of MEMS devices utilizing a polished optical fiber and a modulated laser source. The polished optical fiber and a sidewall of a MEMS device form an optical cavity for the proposed sensor. The sinusoidal phase modulation with extreme point search algorithm enables the proposed sensor to measure displacements larger than the wavelengths of the laser light in real time. The experimental results show that the proposed displacement sensor has a capability to measure displacements larger than 3 μm and it shows the measurement accuracy less than 35 nm. The proposed displacement sensor is then embedded on a single degree-of-freedom MEMS motion stage and tested to monitor its displacement in real time.
Keywords: Displacement sensor; Distributed feedback laser; Fabry-Pérot interferometry; MEMS; Optical fiber; Phase lock; Sinusoidal phase modulation.
Figures








References
-
- Heckert NA, “An EDA approach to experimental design.”
-
- Sahu B, Leang KK, Taylor CR, Emerging challenges of microactuators for nanoscale positioning, assembly, and manipulation, J. Manuf. Sci. Eng. 132 (3) (2010) 030917.
-
- Chowdhury S, et al., Automated cell transport in optical tweezers-assisted microfluidic chambers, IEEE Trans. Autom. Sci. Eng. 10 (4) (October 2013) 980–989.
-
- Zamurovic SHYSA, Dagalakis NG, Lee RD, Kim YS, Embedded capacitive displacement sensor for nanopositioning applications, Proceedings of the Conference on Precision Electromagnetic Measurements, 2010.
-
- Chu LL, Gianchandani YB, A micromachined 2D positioner with electrothermal actuation and sub-nanometer capacitive sensing, J. Micromech. Microeng. 13 (2) (2003) 279.
Grants and funding
LinkOut - more resources
Full Text Sources