

Addressable Acoustic Actuation of 3D Printed Soft Robotic Microsystems
- PMID: 33101852
- PMCID: PMC7578873
- DOI: 10.1002/advs.202001120
Addressable Acoustic Actuation of 3D Printed Soft Robotic Microsystems
Abstract
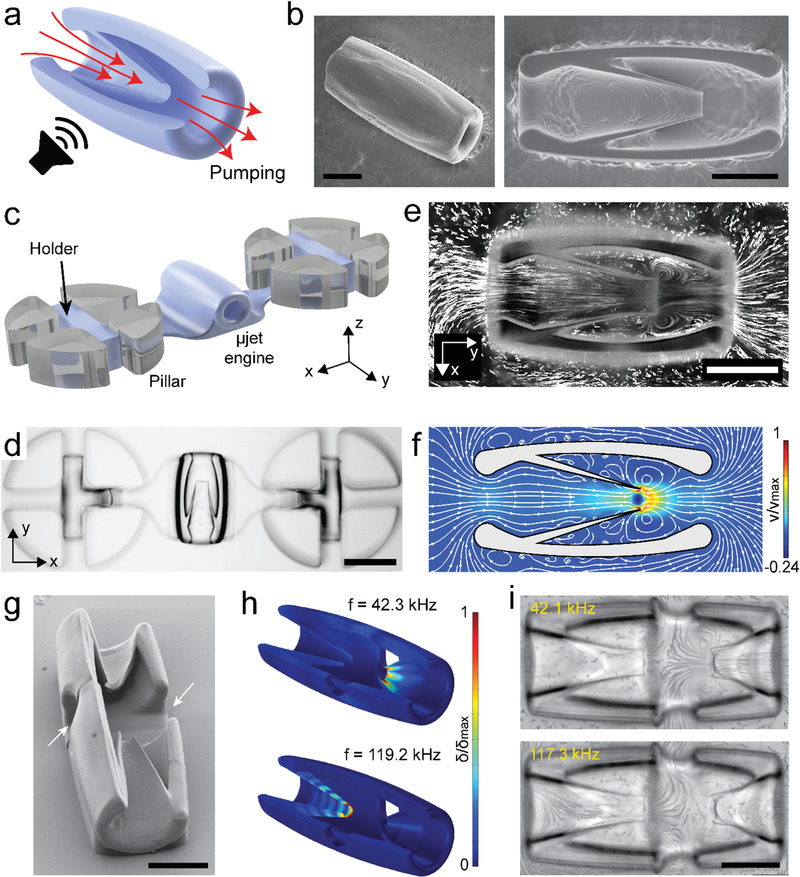
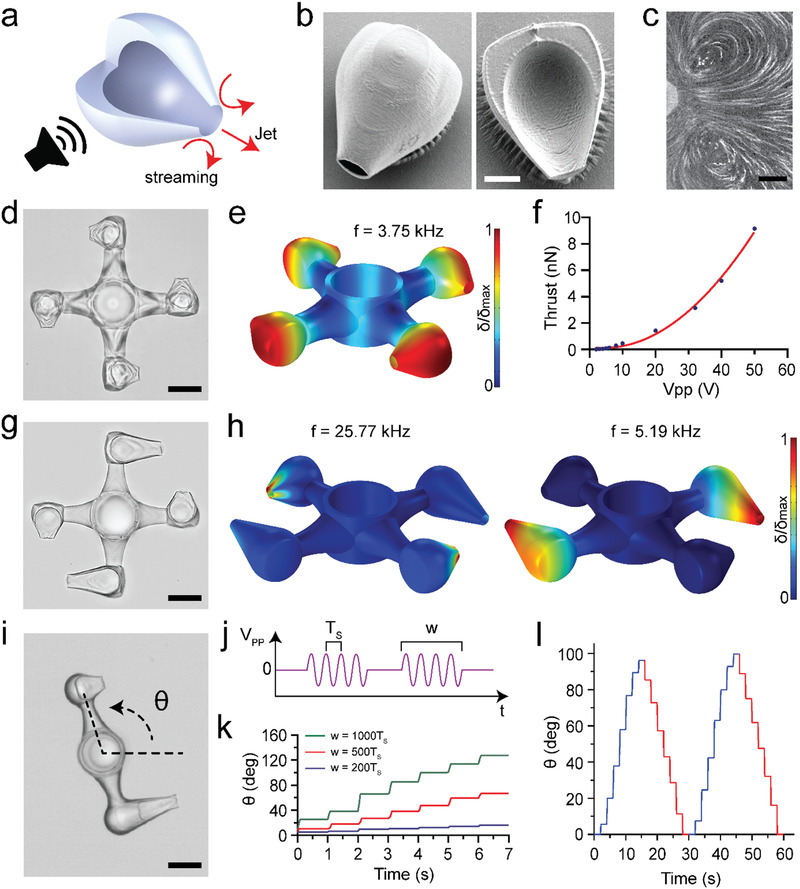
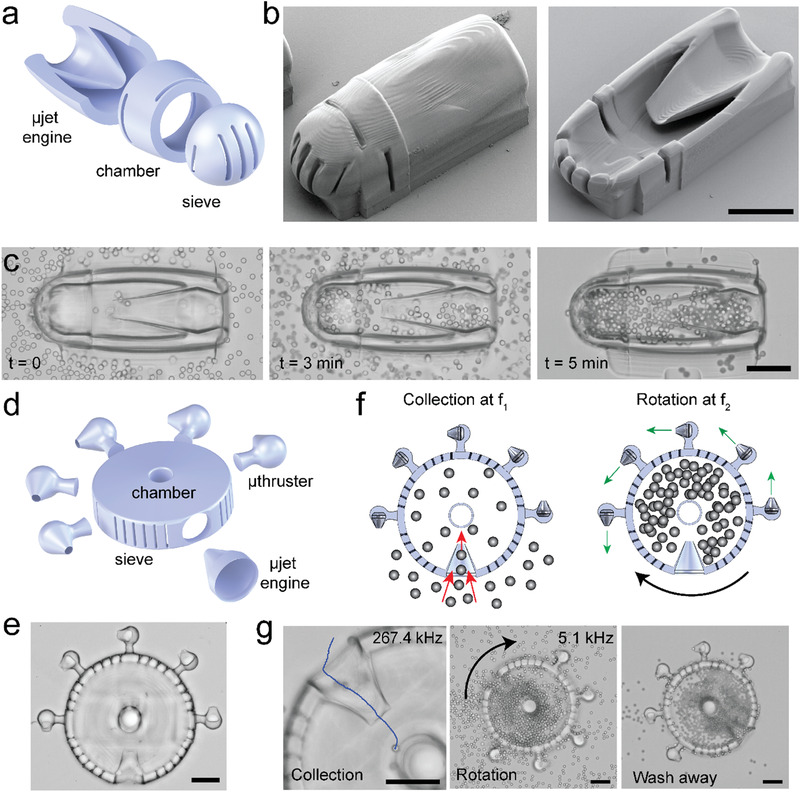
A design, manufacturing, and control methodology is presented for the transduction of ultrasound into frequency-selective actuation of multibody hydrogel mechanical systems. The modular design of compliant mechanisms is compatible with direct laser writing and the multiple degrees of freedom actuation scheme does not require incorporation of any specific material such as air bubbles. These features pave the way for the development of active scaffolds and soft robotic microsystems from biomaterials with tailored performance and functionality. Finite element analysis and computational fluid dynamics are used to quantitatively predict the performance of acoustically powered hydrogels immersed in fluid and guide the design process. The outcome is the remotely controlled operation of a repertoire of untethered biomanipulation tools including monolithic compound micromachinery with multiple pumps connected to various functional devices. The potential of the presented technology for minimally invasive diagnosis and targeted therapy is demonstrated by a soft microrobot that can on-demand collect, encapsulate, and process microscopic samples.
Keywords: acoustic waves; biomanipulation; direct laser writing; mechanical design; soft robotics.
© 2020 The Authors. Published by Wiley‐VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Sackmann E. K., Fulton A. L., Beebe D. J., Nature 2014, 507, 181. - PubMed
-
- Kearney C. J., Mooney D. J., Nat. Mater. 2013, 12, 1004. - PubMed
-
- Steiger C., Abramson A., Nadeau P., Chandrakasan A. P., Langer R., Traverso G., Nat. Rev. Mater. 2019, 4, 83.
-
- Wang Y., Kohane D. S., Nat. Rev. Mater. 2017, 2, 17020.
-
- Zhang H., Jackson J. K., Chiao M., Adv. Funct. Mater. 2017, 27, 1703606.
LinkOut - more resources
Full Text Sources