

Graph Search-Based Exploration Method Using a Frontier-Graph Structure for Mobile Robots
- PMID: 33153237
- PMCID: PMC7662437
- DOI: 10.3390/s20216270
Graph Search-Based Exploration Method Using a Frontier-Graph Structure for Mobile Robots
Abstract
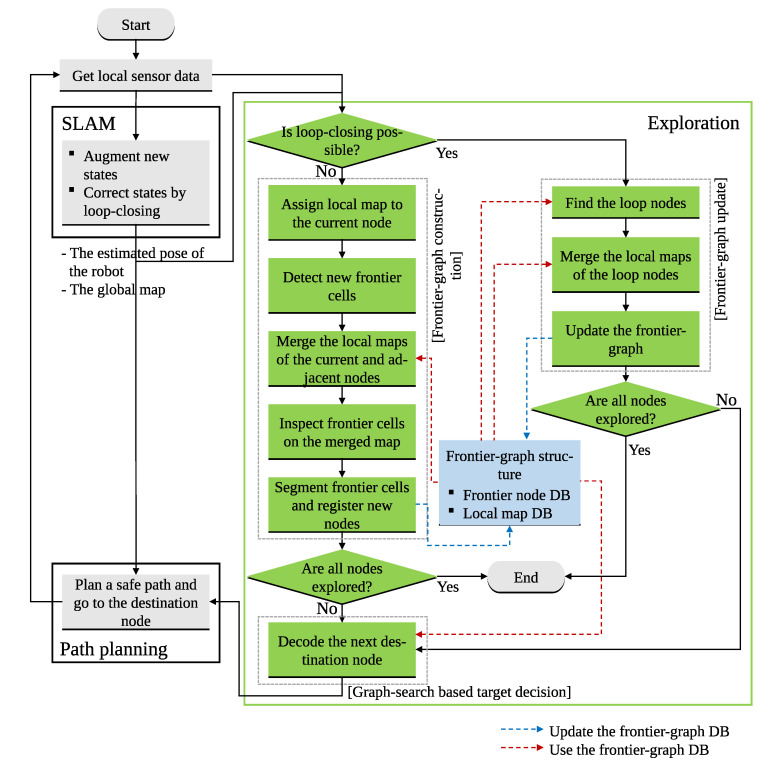
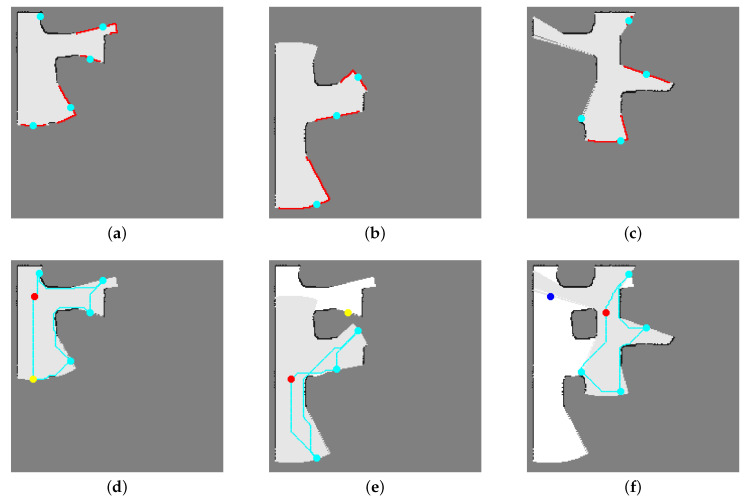
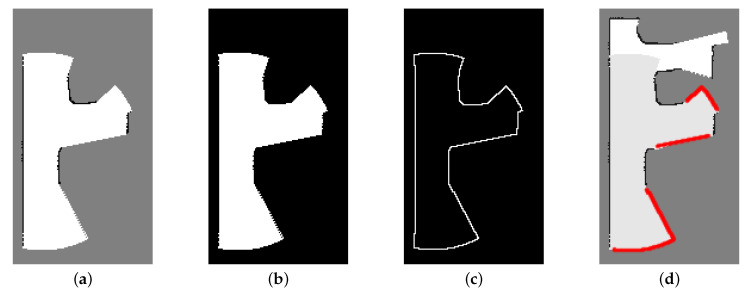
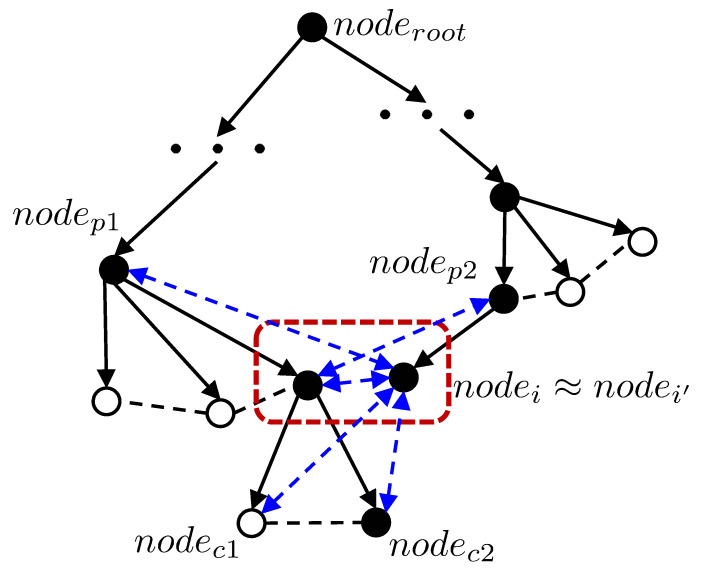
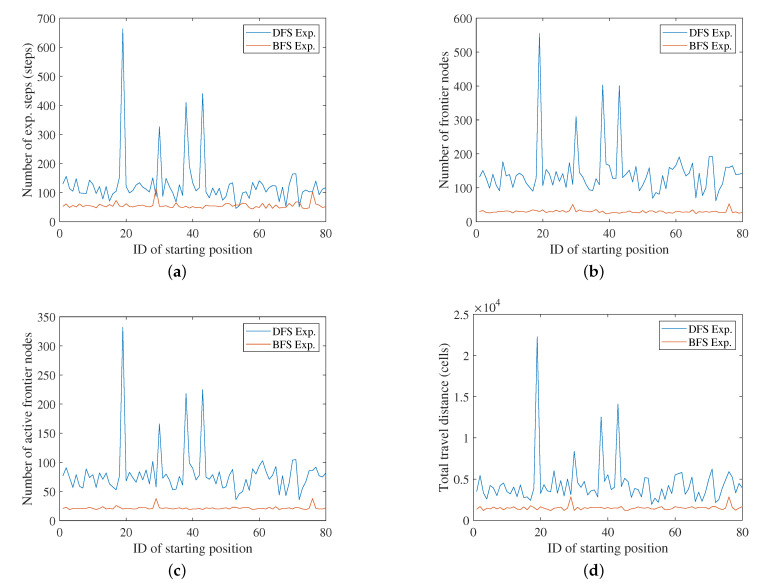
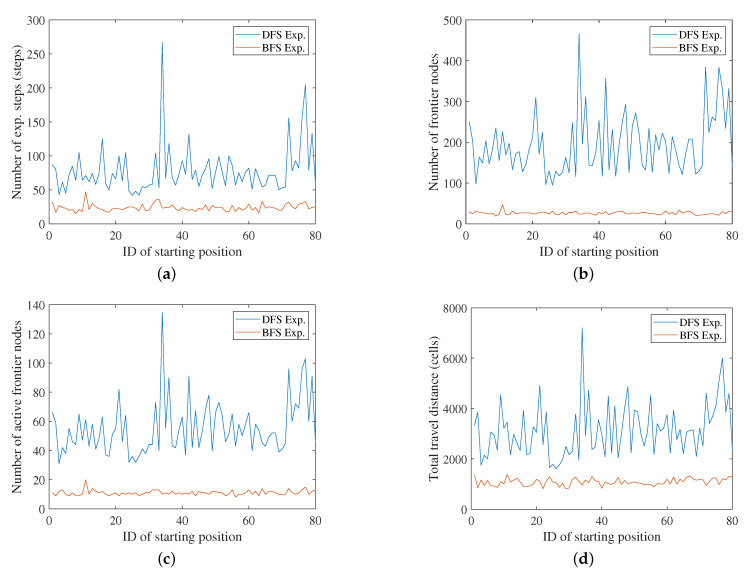
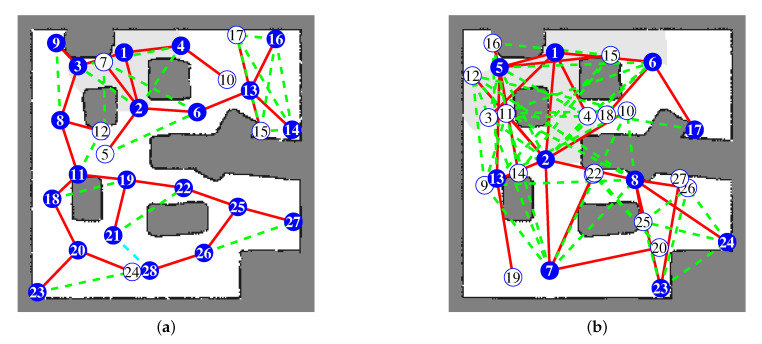
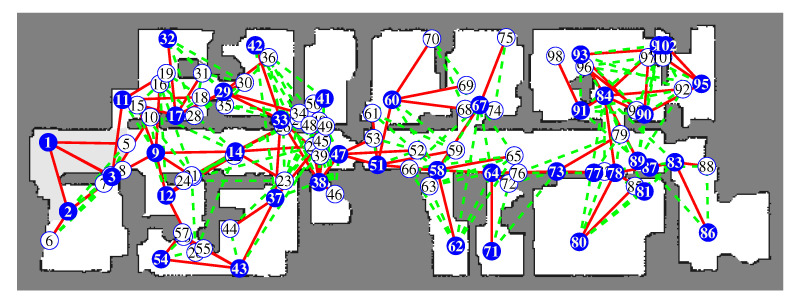
This paper describes a graph search-based exploration method. Segmented frontier nodes and their relative transformations constitute a frontier-graph structure. Frontier detection and segmentation are performed using local grid maps of adjacent nodes. The proposed frontier-graph structure can systematically manage local information according to the exploration state and overcome the problem caused by updating a single global grid map. The robot selects the next target using breadth-first search (BFS) exploration of the frontier-graph. The BFS exploration is improved to generate an efficient loop-closing sequence between adjacent nodes. We verify that our BFS-based exploration method can gradually extend the frontier-graph structure and efficiently map the entire environment, regardless of the starting position.
Keywords: breadth-first search; depth-first search; exploration; frontier detection; loop-closing; mobile robots.
Conflict of interest statement
The author declares no conflict of interest.
Figures

Similar articles
-
A Versatile Approach for Adaptive Grid Mapping and Grid Flex-Graph Exploration with a Field-Programmable Gate Array-Based Robot Using Hardware Schemes.Sensors (Basel). 2024 Apr 26;24(9):2775. doi: 10.3390/s24092775. Sensors (Basel). 2024. PMID: 38732882 Free PMC article.
-
Topological Frontier-Based Exploration and Map-Building Using Semantic Information.Sensors (Basel). 2019 Oct 22;19(20):4595. doi: 10.3390/s19204595. Sensors (Basel). 2019. PMID: 31652607 Free PMC article.
-
SURF: Direction-Optimizing Breadth-First Search Using Workload State on GPUs.Sensors (Basel). 2022 Jun 29;22(13):4899. doi: 10.3390/s22134899. Sensors (Basel). 2022. PMID: 35808392 Free PMC article.
-
A Survey of Graph Cuts/Graph Search Based Medical Image Segmentation.IEEE Rev Biomed Eng. 2018;11:112-124. doi: 10.1109/RBME.2018.2798701. Epub 2018 Jan 26. IEEE Rev Biomed Eng. 2018. PMID: 29994356 Review.
-
Using insects to drive mobile robots - hybrid robots bridge the gap between biological and artificial systems.Arthropod Struct Dev. 2017 Sep;46(5):723-735. doi: 10.1016/j.asd.2017.02.003. Epub 2017 Mar 18. Arthropod Struct Dev. 2017. PMID: 28254451 Review.
References
-
- Latif Y., Cadena C., Neira J. Robust loop closing over time for pose graph SLAM. Int. J. Robot. Res. 2013;32:1611–1626. doi: 10.1177/0278364913498910. - DOI
-
- Yamauchi B. Frontier-based exploration using multiple robots; Proceedings of the Second International Conference on Autonomous Agents; Minneapolis, MN, USA. 9–13 May 1998; pp. 47–53.
-
- Shade R., Newman P. Choosing where to go: Complete 3D exploration with stereo; Proceedings of the 2011 IEEE International Conference on Robotics and Automation; Shanghai, China. 9–13 May 2011; pp. 2806–2811.
Grants and funding
LinkOut - more resources
Full Text Sources
