

HASEL Artificial Muscles for a New Generation of Lifelike Robots-Recent Progress and Future Opportunities
- PMID: 33166000
- PMCID: PMC11469257
- DOI: 10.1002/adma.202003375
HASEL Artificial Muscles for a New Generation of Lifelike Robots-Recent Progress and Future Opportunities
Abstract
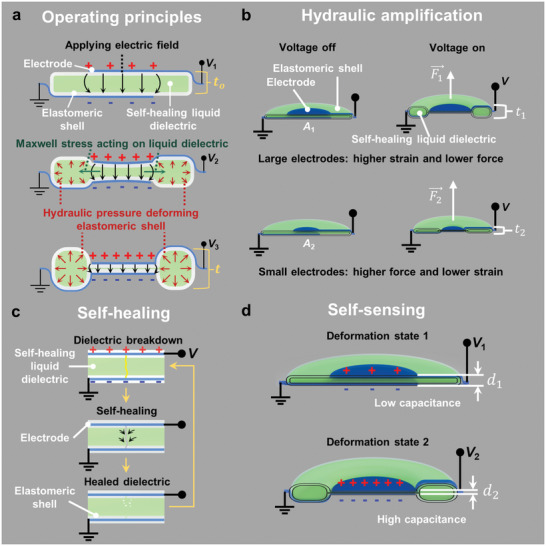
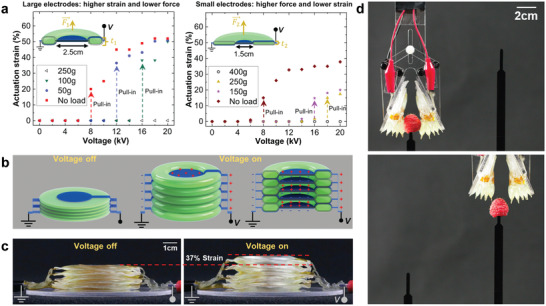
Future robots and intelligent systems will autonomously navigate in unstructured environments and closely collaborate with humans; integrated with our bodies and minds, they will allow us to surpass our physical limitations. Traditional robots are mostly built from rigid, metallic components and electromagnetic motors, which make them heavy, expensive, unsafe near people, and ill-suited for unpredictable environments. By contrast, biological organisms make extensive use of soft materials and radically outperform robots in terms of dexterity, agility, and adaptability. Particularly, natural muscle-a masterpiece of evolution-has long inspired researchers to create "artificial muscles" in an attempt to replicate its versatility, seamless integration with sensing, and ability to self-heal. To date, natural muscle remains unmatched in all-round performance, but rapid advancements in soft robotics have brought viable alternatives closer than ever. Herein, the recent development of hydraulically amplified self-healing electrostatic (HASEL) actuators, a new class of high-performance, self-sensing artificial muscles that couple electrostatic and hydraulic forces to achieve diverse modes of actuation, is discussed; current designs match or exceed natural muscle in many metrics. Research on materials, designs, fabrication, modeling, and control systems for HASEL actuators is detailed. In each area, research opportunities are identified, which together lays out a roadmap for actuators with drastically improved performance. With their unique versatility and wide potential for further improvement, HASEL actuators are poised to play an important role in a paradigm shift that fundamentally challenges the current limitations of robotic hardware toward future intelligent systems that replicate the vast capabilities of biological organisms.
Keywords: HASEL actuators; artificial muscles; electrostatics; robotics; soft actuators.
© 2020 The Authors. Published by Wiley-VCH GmbH.
Conflict of interest statement
C.K., S.K.M., N.K., and E.A. are listed as inventors on a U.S. provisional patent application (62/813266) and PCT applications (PCT/US2018/023797 and PCT/US19/020568) which cover fundamentals and basic designs of HASEL actuators as well as methods of fabrication. C.K. S.K.M, and E.A. are listed as inventors on a U.S. provisional patent application (62/886820) that details use of HASEL actuators as pumps. C.K. and S.K.M. are listed as inventors on a U.S. provisional patent application (62/946317) that describes high strain Peano‐HASEL actuators. C.K., S.K.M., N.K., and P.R. are listed as inventors on a PCT application (PCT/US20/20978) that details composite dielectric structures for HASEL actuators. C.K., S.K.M., N.K., and E.A. are cofounders of Artimus Robotics, a start‐up company commercializing HASEL actuators.
Figures











References
-
- Tuthill J. C., Azim E., Curr. Biol. 2018, 28, R194. - PubMed
-
- Chapman A., England's Leonardo: Robert Hooke and the Seventeenth‐Century Scientific Revolution, IOP Publishing, Bristol, UK: 2005.
-
- Mirfakhrai T., Madden J. D. W., Baughman R. H., Mater. Today 2007, 10, 30.
-
- Madden J. D. W., Vandesteeg N. A., Anquetil P. A., Madden P. G. A., Takshi A., Pytel R. Z., Lafontaine S. R., Wieringa P. A., Hunter I. W., IEEE J. Oceanic Eng. 2004, 29, 706.
-
- Yang G.‐Z., Bellingham J., Dupont P. E., Fischer P., Floridi L., Full R., Jacobstein N., Kumar V., McNutt M., Merrifield R., Nelson B. J., Scassellati B., Taddeo M., Taylor R., Veloso M., Wang Z. L., Wood R., Sci. Rob. 2018, 3, eaar7650. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
