

Medical Micro/Nanorobots in Precision Medicine
- PMID: 33173743
- PMCID: PMC7610261
- DOI: 10.1002/advs.202002203
Medical Micro/Nanorobots in Precision Medicine
Abstract
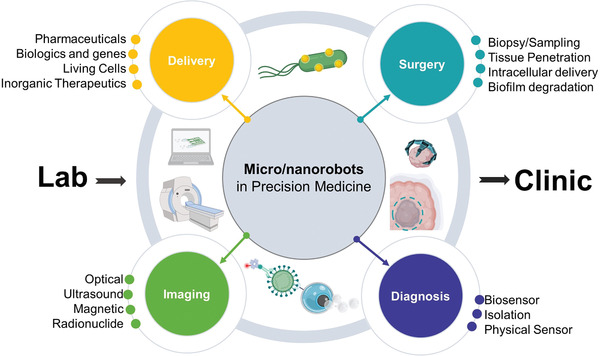
Advances in medical robots promise to improve modern medicine and the quality of life. Miniaturization of these robotic platforms has led to numerous applications that leverages precision medicine. In this review, the current trends of medical micro and nanorobotics for therapy, surgery, diagnosis, and medical imaging are discussed. The use of micro and nanorobots in precision medicine still faces technical, regulatory, and market challenges for their widespread use in clinical settings. Nevertheless, recent translations from proof of concept to in vivo studies demonstrate their potential toward precision medicine.
Keywords: diagnosis; medical imaging; micro/nanorobots; microsurgery; precision medicine; targeted delivery.
© 2020 The Authors. Published by Wiley‐VCH GmbH.
Conflict of interest statement
Prof. Utkan Demirci (U.D.) is a founder of and has an equity interest in: i) DxNow Inc. ii) Koek Biotech, iii) Levitas Inc. iv) Hillel Inc. U.D.'s interests were viewed and managed in accordance with the conflict of interest policies.
Figures


References
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources