

Localization and Actuation for MNPs Based on Magnetic Field-Free Point: Feasibility of Movable Electromagnetic Actuations
- PMID: 33233414
- PMCID: PMC7700462
- DOI: 10.3390/mi11111020
Localization and Actuation for MNPs Based on Magnetic Field-Free Point: Feasibility of Movable Electromagnetic Actuations
Abstract
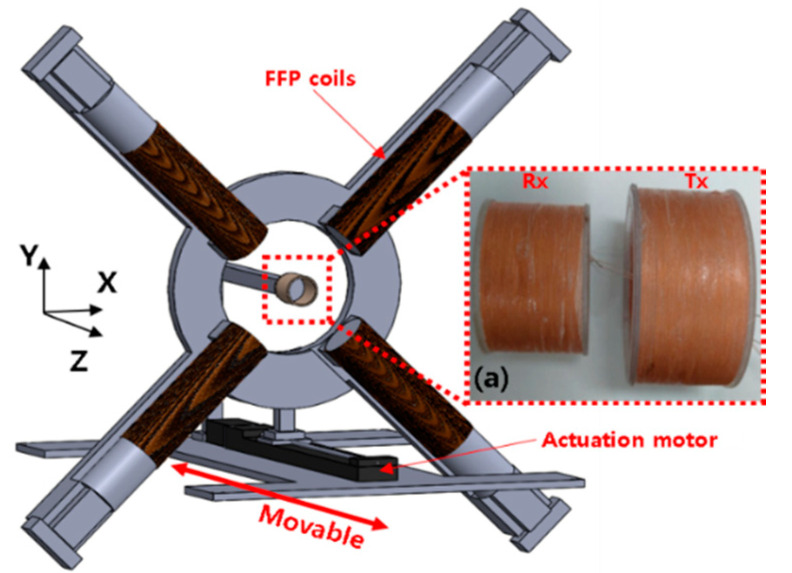
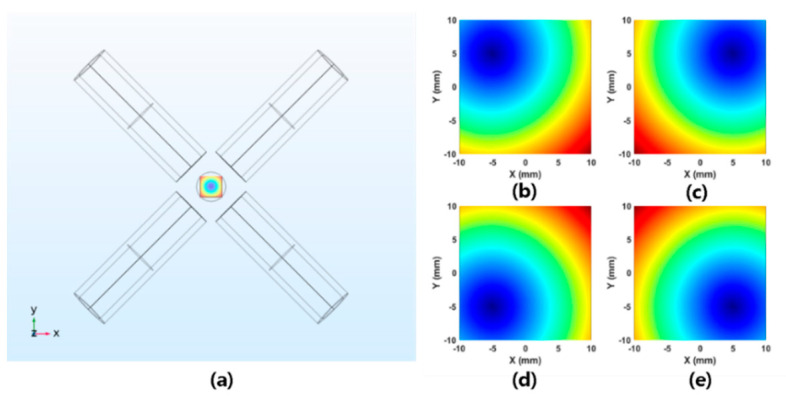
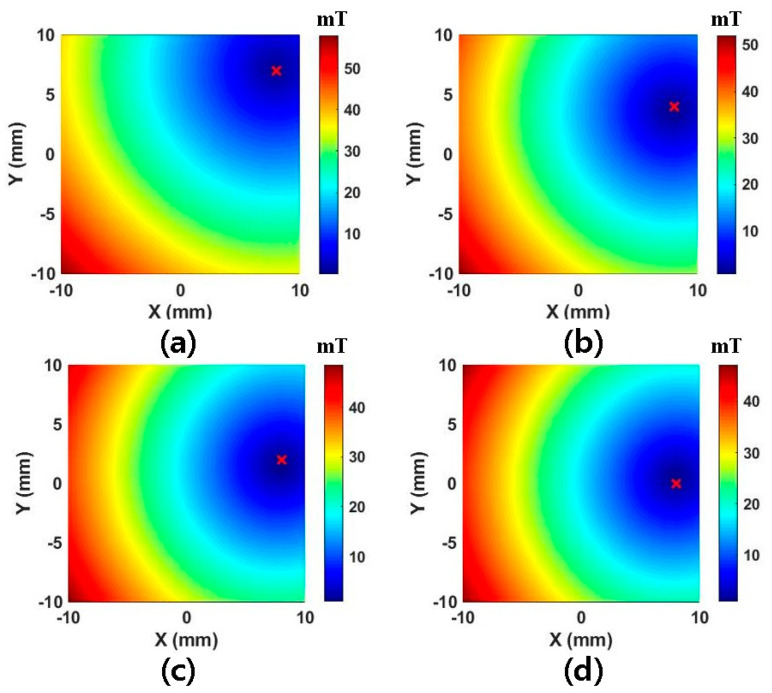
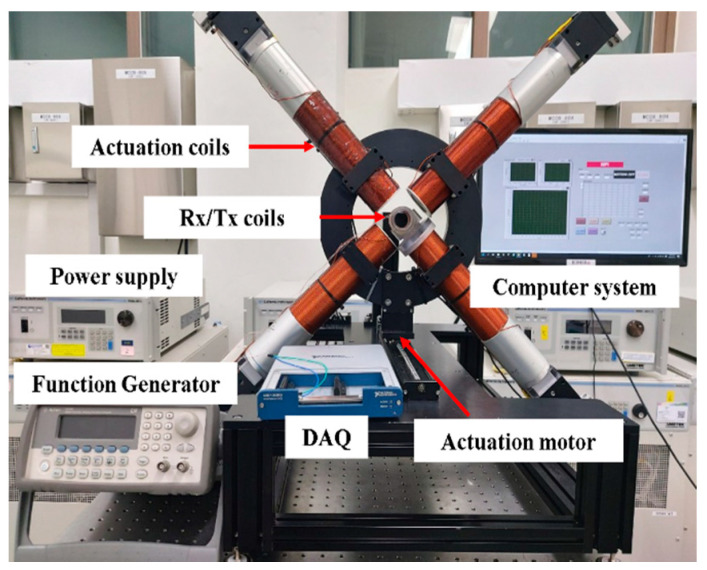
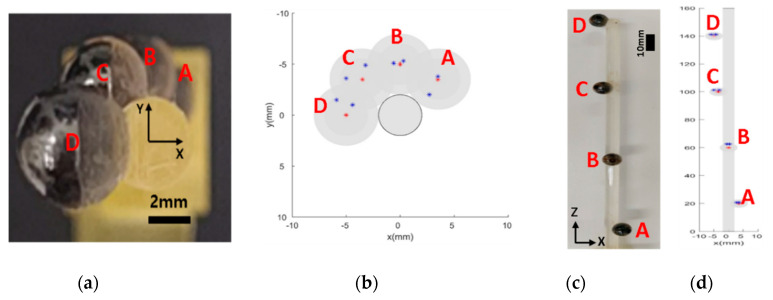
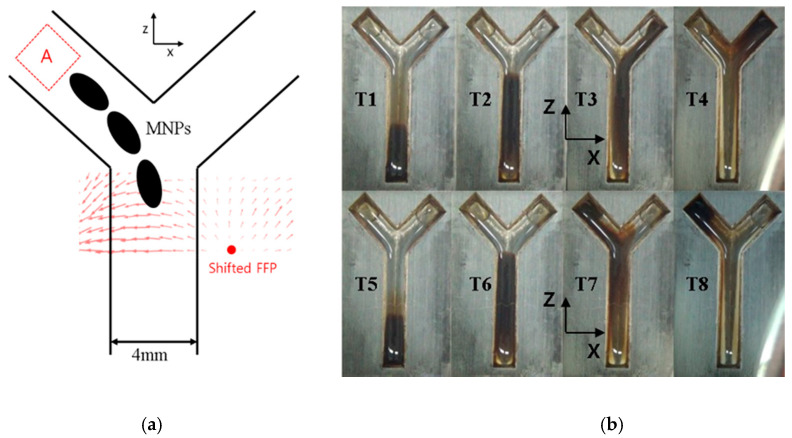
Targeted drug delivery (TDD) based on magnetic nanoparticles (MNPs) and external magnetic actuation is a promising drug delivery technology compared to conventional treatments usually utilized in cancer therapy. However, the implementation of a TDD system at a clinical site based on considerations for the actual size of the human body requires a simplified structure capable of both external actuation and localization. To address these requirements, we propose a novel approach to localize drug carriers containing MNPs by manipulating the field-free point (FFP) mechanism in the principal magnetic field. To this end, we devise a versatile electromagnetic actuation (EMA) system for FFP generation based on four coils affixed to a movable frame. By the Biot-Savart law, the FFP can be manipulated by appropriately controlling the gradient field strength at the target area using the EMA system. Further, weighted-norm solutions are utilized to correct the positions of FFP to improve the accuracy of FFP displacement in the region of interest (ROI). As MNPs, ferrofluid is used to experiment with 2D and 3D localizations in a blocked phantom placed in the designed ROI. The resultant root mean square error of the localizations is observed to be approximately 1.4 mm in the 2D case and 1.6 mm in the 3D case. Further, the proposed movable EMA is verified to be capable of simultaneously scanning multiple points as well as the actuation and imaging of MNPs. Based on the success of the experiments in this study, further research is intended to be conducted in scale-up system development to design precise TDD systems at clinical sites.
Keywords: 3D localization; field-free point; movable electromagnetic actuation system.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Dhavale R.P., Waifalkar P.P., Sharma A., Dhavale R.P., Sahoo S.C., Kollu P., Chougale A.D., Zahn D.R.T., Salvan G., Patil P.S., et al. Monolayer grafting of aminosilane on magnetic nanoparticles: An efficient approach for targeted drug delivery system. J. Colloid Interface Sci. 2018;529:415–425. doi: 10.1016/j.jcis.2018.06.006. - DOI - PubMed
-
- Hoshiar A.K., Le T.A., Amin F.U., Kim M.O., Yoon J. Functionalized electromagnetic actuation method for aggregated nanoparticles steering; Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS; Seogwipo, Korea. 11–15 July 2017; pp. 885–888. - DOI - PubMed
-
- Nguyen K.T., Hoang M.C., Choi E., Kang B., Park J.O., Kim C.S. Medical Microrobot — A Drug Delivery Capsule Endoscope with Active Locomotion and Drug Release Mechanism: Proof of Concept. Int. J. Control. Autom. Syst. 2020;18:65–75. doi: 10.1007/s12555-019-0240-0. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
