

Dome-Patterned Metamaterial Sheets
- PMID: 33240759
- PMCID: PMC7675196
- DOI: 10.1002/advs.202001955
Dome-Patterned Metamaterial Sheets
Abstract
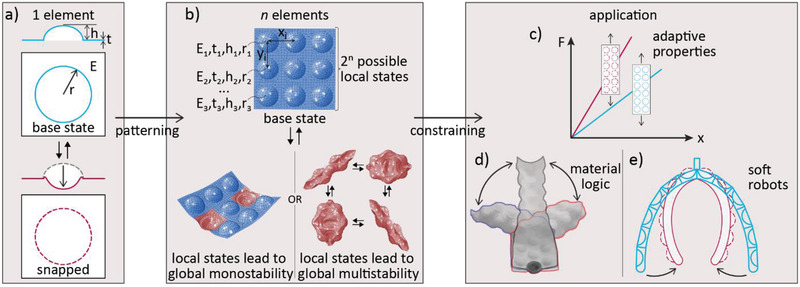
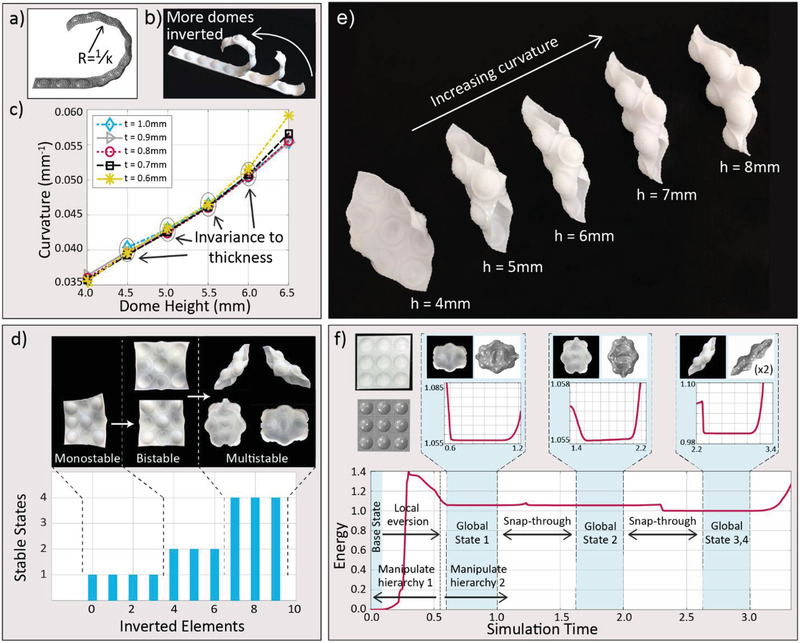
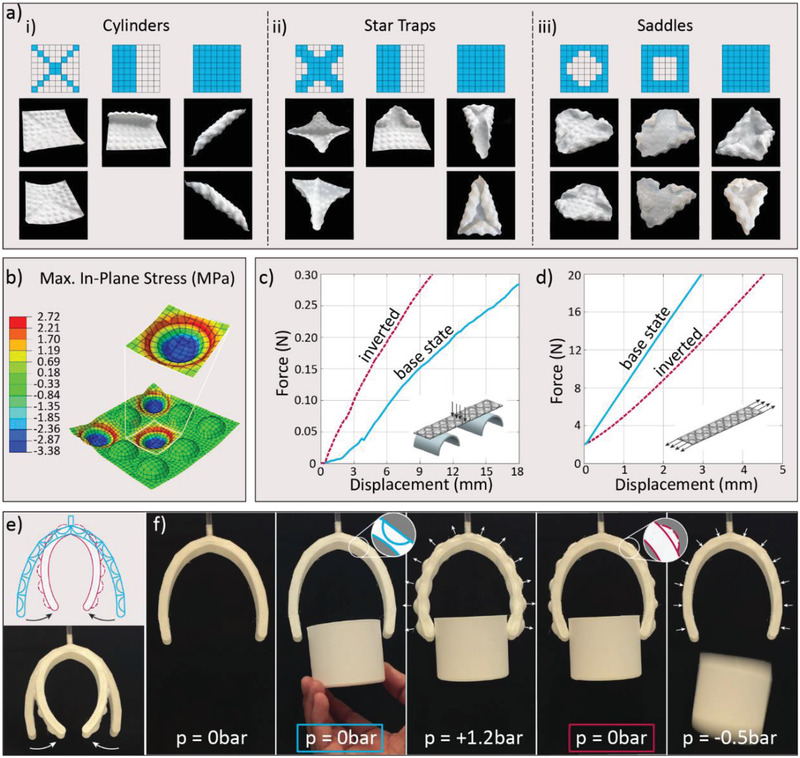
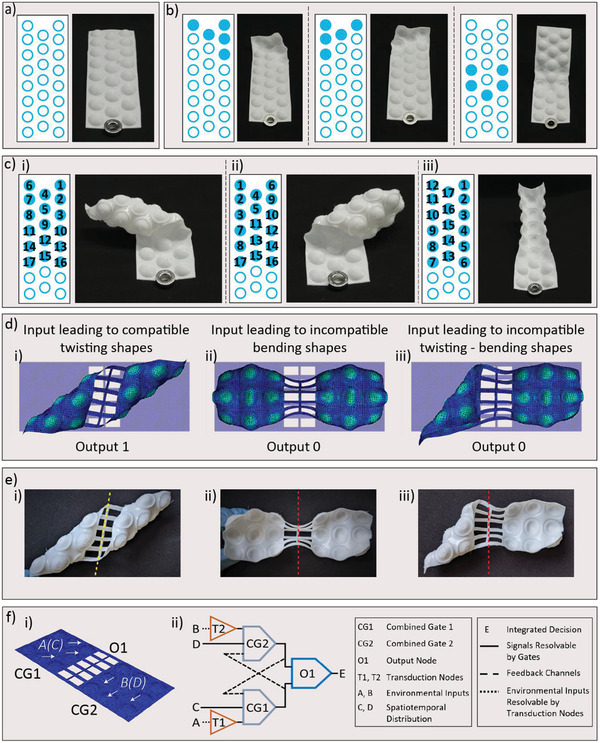
The properties of conventional materials result from the arrangement of and the interaction between atoms at the nanoscale. Metamaterials have shifted this paradigm by offering property control through structural design at the mesoscale, thus broadening the design space beyond the limits of traditional materials. A family of mechanical metamaterials consisting of soft sheets featuring a patterned array of reconfigurable bistable domes is reported here. The domes in this metamaterial architecture can be reversibly inverted at the local scale to generate programmable multistable shapes and tunable mechanical responses at the global scale. By 3D printing a robotic gripper with energy-storing skin and a structure that can memorize and compute spatially-distributed mechanical signals, it is shown that these metamaterials are an attractive platform for novel mechanologic concepts and open new design opportunities for structures used in robotics, architecture, and biomedical applications.
Keywords: hierarchical multistability; mechanical metamaterials; mechanologic; soft robotics.
© 2020 The Authors. Published by Wiley‐VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Lakes R. S., Science 1987, 235, 1038. - PubMed
-
- Lakes R. S., Adv. Mater. 1993, 5, 293.
-
- Silverberg J. L., Evans A. A., McLeod L., Hayward R. C., Hull T., Santangelo C. D., Cohen I., Science 2014, 345, 647. - PubMed
-
- Waitukaitis S., Menaut R., Chen B. G. G., Van Hecke M., Phys. Rev. Lett. 2015, 114, 2. - PubMed
-
- Overvelde J. T. B., Weaver J. C., Hoberman C., Bertoldi K., Nature 2017, 541, 347. - PubMed
LinkOut - more resources
Full Text Sources