

Rapid evolution of coordinated and collective movement in response to artificial selection
- PMID: 33268362
- PMCID: PMC7710366
- DOI: 10.1126/sciadv.aba3148
Rapid evolution of coordinated and collective movement in response to artificial selection
Abstract
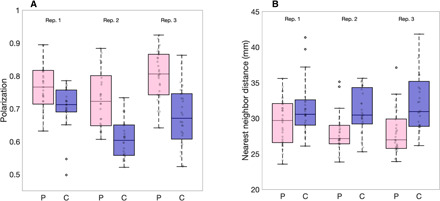
Collective motion occurs when individuals use social interaction rules to respond to the movements and positions of their neighbors. How readily these social decisions are shaped by selection remains unknown. Through artificial selection on fish (guppies, Poecilia reticulata) for increased group polarization, we demonstrate rapid evolution in how individuals use social interaction rules. Within only three generations, groups of polarization-selected females showed a 15% increase in polarization, coupled with increased cohesiveness, compared to fish from control lines. Although lines did not differ in their physical swimming ability or exploratory behavior, polarization-selected fish adopted faster speeds, particularly in social contexts, and showed stronger alignment and attraction responses to multiple neighbors. Our results reveal the social interaction rules that change when collective behavior evolves.
Copyright © 2020 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works. Distributed under a Creative Commons Attribution NonCommercial License 4.0 (CC BY-NC).
Figures

References
-
- Couzin I. D., Krause J., Franks N. R., Levin S. A., Effective leadership and decision-making in animal groups on the move. Nature 433, 513–516 (2005). - PubMed
-
- Breder C. M., Jr., Equations descriptive of fish schools and other animal aggregations. Ecology 35, 361–370 (1954).
-
- Calovi D. S., Lopez U., Ngo S., Sire C., Chaté H., Theraulaz G., Swarming, schooling, milling: Phase diagram of a data-driven fish school model. New J. Phys. 16, 015026 (2014).
Publication types
LinkOut - more resources
Full Text Sources
