

Design and Validation of a Powered Knee-Ankle Prosthesis with High-Torque, Low-Impedance Actuators
- PMID: 33299386
- PMCID: PMC7720653
- DOI: 10.1109/TRO.2020.3005533
Design and Validation of a Powered Knee-Ankle Prosthesis with High-Torque, Low-Impedance Actuators
Abstract
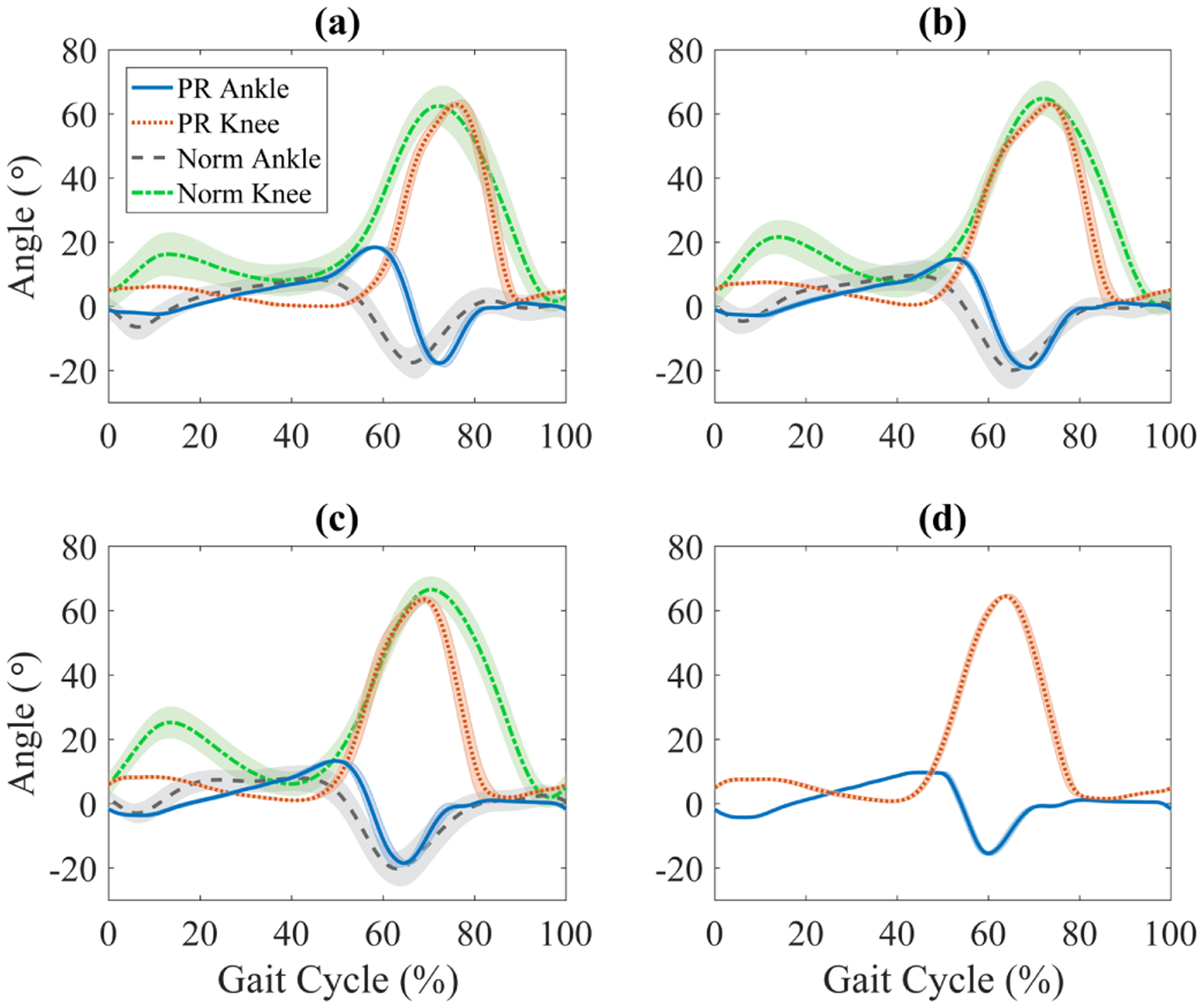
We present the design of a powered knee-ankle prosthetic leg, which implements high-torque actuators with low-reduction transmissions. The transmission coupled with a high-torque and low-speed motor creates an actuator with low mechanical impedance and high backdrivability. This style of actuation presents several possible benefits over modern actuation styles in emerging robotic prosthetic legs, which include free-swinging knee motion, compliance with the ground, negligible unmodeled actuator dynamics, less acoustic noise, and power regeneration. Benchtop tests establish that both joints can be backdriven by small torques (~1-3 Nm) and confirm the small reflected inertia. Impedance control tests prove that the intrinsic impedance and unmodeled dynamics of the actuator are sufficiently small to control joint impedance without torque feedback or lengthy tuning trials. Walking experiments validate performance under the designed loading conditions with minimal tuning. Lastly, the regenerative abilities, low friction, and small reflected inertia of the presented actuators reduced power consumption and acoustic noise compared to state-of-art powered legs.
Keywords: actuator design; backdrivability; powered prostheses; rehabilitation robotics.
Figures






















References
-
- Miller W, Deathe A, Speechley M, and Koval J, “The influence of falling, fear of falling, and balance confidence on prosthetic mobility and social activity among individuals with a lower extremity amputation,” Arch. Phys. Med. Rehab, vol. 82, no. 9, pp. 1238–1244, 2001. - PubMed
-
- Gailey RS, Wenger MA, Raya M, Kirk N, Erbs K, Spyropoulos P, and Nash MS, “Energy expenditure of trans-tibial amputees during ambulation at self-selected pace,” Prosthetics Orthotics Int, vol. 18, no. 2, p. 84, 1994. - PubMed
-
- Lambrecht BG and Kazerooni H, “Design of a semi-active knee prosthesis,” in IEEE Int. Conf. Robot. Automat, 2009, pp. 639–645.
-
- Berry D, “Microprocessor prosthetic knees,” Physical Medicine and Rehabilitation Clinics, vol. 17, no. 1, pp. 91–113, 2006. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources