

Value-complexity tradeoff explains mouse navigational learning
- PMID: 33306669
- PMCID: PMC7758052
- DOI: 10.1371/journal.pcbi.1008497
Value-complexity tradeoff explains mouse navigational learning
Abstract
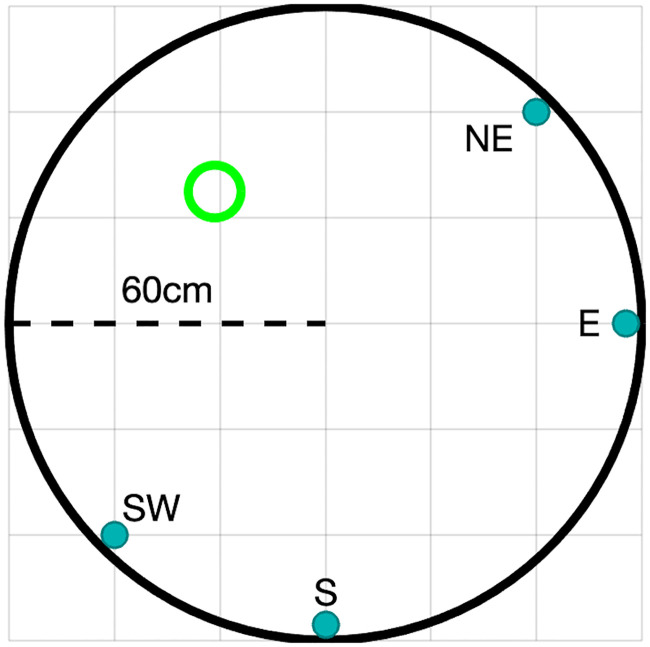
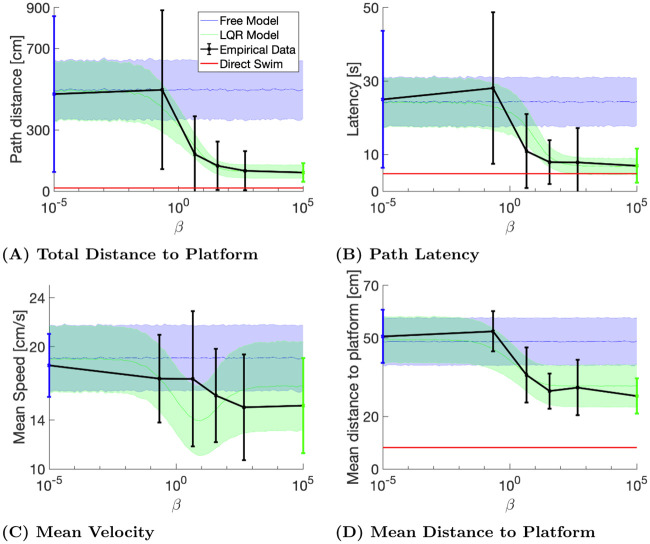
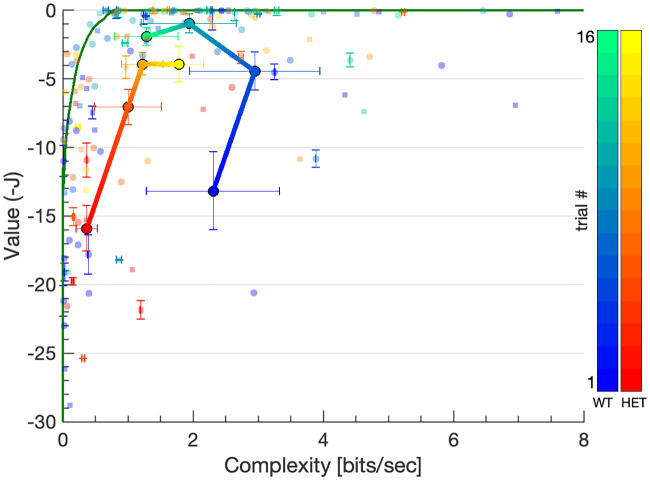
We introduce a novel methodology for describing animal behavior as a tradeoff between value and complexity, using the Morris Water Maze navigation task as a concrete example. We develop a dynamical system model of the Water Maze navigation task, solve its optimal control under varying complexity constraints, and analyze the learning process in terms of the value and complexity of swimming trajectories. The value of a trajectory is related to its energetic cost and is correlated with swimming time. Complexity is a novel learning metric which measures how unlikely is a trajectory to be generated by a naive animal. Our model is analytically tractable, provides good fit to observed behavior and reveals that the learning process is characterized by early value optimization followed by complexity reduction. Furthermore, complexity sensitively characterizes behavioral differences between mouse strains.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures




References
-
- Sutton RS, Barto AG, et al. Reinforcement learning: An introduction. MIT press; 1998.
-
- Morris RGM. Spatial localization does not require the presence of local cues. Learning and Motivation. 1981;12(2):239–260. 10.1016/0023-9690(81)90020-5 - DOI
-
- Gallagher M, Burwell R, Burchinal M. Severity of Spatial Learning Impairment in Aging: Development of a Learning Index for Performance in the Morris Water Maze Measures Traditionally Used for Behavioral Analysis in the Water Maze. Behavioral Neurosctence. 1993;107(4):8–626. Available from: https://www.brown.edu/research/labs/burwell/sites/brown.edu.research.lab.... - PubMed
-
- Bryson AE. Applied optimal control: optimization, estimation and control. CRC Press; 1975.
-
- Cover TM, Thomas JA. Elements of information theory. John Wiley & Sons; 2012.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
