

Supportive consensus
- PMID: 33332368
- PMCID: PMC7746199
- DOI: 10.1371/journal.pone.0243215
Supportive consensus
Abstract
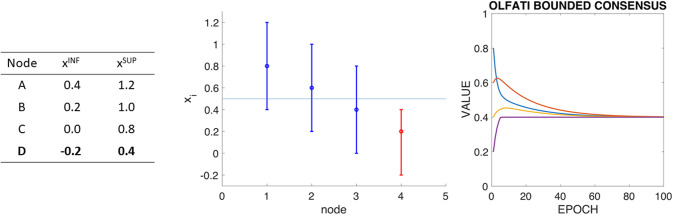
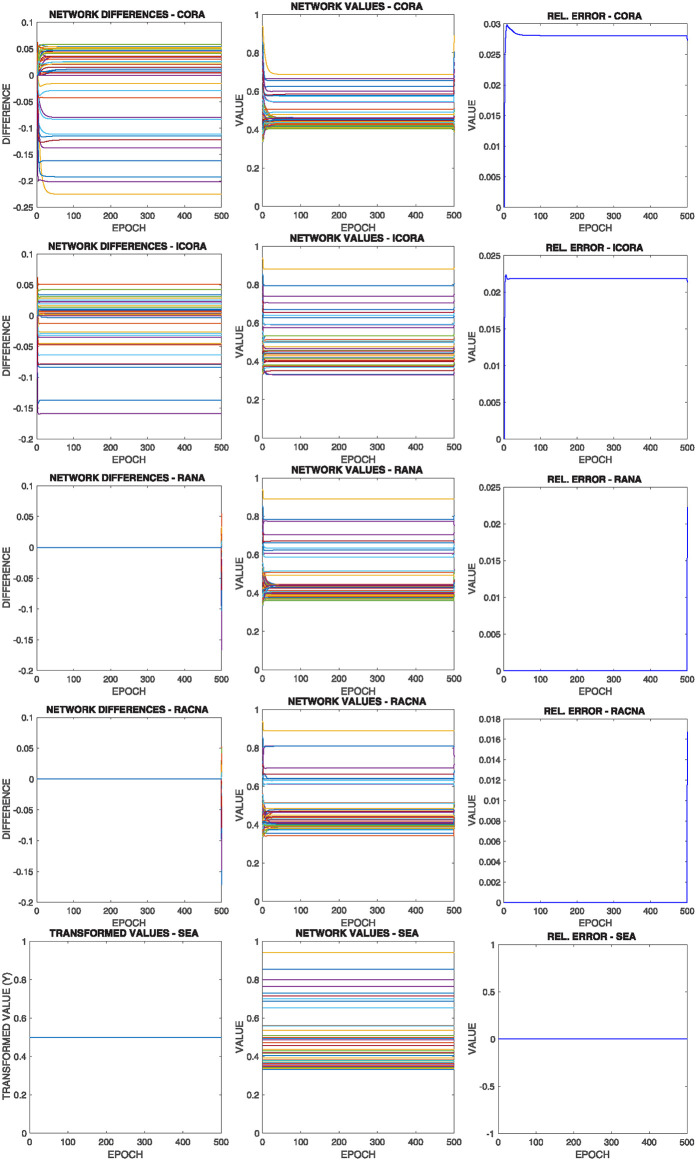
The paper is concerned with the consensus problem in a multi-agent system such that each agent has boundary constraints. Classical Olfati-Saber's consensus algorithm converges to the same value of the consensus variable, and all the agents reach the same value. These algorithms find an equality solution. However, what happens when this equality solution is out of the range of some of the agents? In this case, this solution is not adequate for the proposed problem. In this paper, we propose a new kind of algorithms called supportive consensus where some agents of the network can compensate for the lack of capacity of other agents to reach the average value, and so obtain an acceptable solution for the proposed problem. Supportive consensus finds an equity solution. In the rest of the paper, we define the supportive consensus, analyze and demonstrate the network's capacity to compensate out of boundaries agents, propose different supportive consensus algorithms, and finally, provide some simulations to show the performance of the proposed algorithms.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures














References
-
- Olfati-Saber R, Murray RM. Consensus Problems in Networks of Agents with Switching Topology and Time-Delays. IEEE TAC. 2004;49(9):1520–1533.
-
- Olfati-Saber R, Fax JA, Murray RM. Consensus and Cooperation in Networked Multi-Agent Systems. Proceedings of the IEEE. 2007;95(1):215–233. 10.1109/JPROC.2006.887293 - DOI
-
- Pérez IJ, Cabrerizo FJ, Alonso S, Dong YC, Chiclana F, Herrera-Viedma E. On dynamic consensus processes in group decision making problems. Information Sciences. 2018;459:20–35. 10.1016/j.ins.2018.05.017 - DOI
-
- Fischbacher U, Gachter S. Social preferences, beliefs, and the dynamics of free riding in public goods experiments. American economic review. 2010;100(1):541–56. 10.1257/aer.100.1.541 - DOI
-
- Du S, Hu L, Song M. Production optimization considering environmental performance and preference in the cap-and-trade system. Journal of Cleaner Production. 2016;112:1600–1607. 10.1016/j.jclepro.2014.08.086 - DOI
