

Active foot placement control ensures stable gait: Effect of constraints on foot placement and ankle moments
- PMID: 33332421
- PMCID: PMC7746185
- DOI: 10.1371/journal.pone.0242215
Active foot placement control ensures stable gait: Effect of constraints on foot placement and ankle moments
Abstract
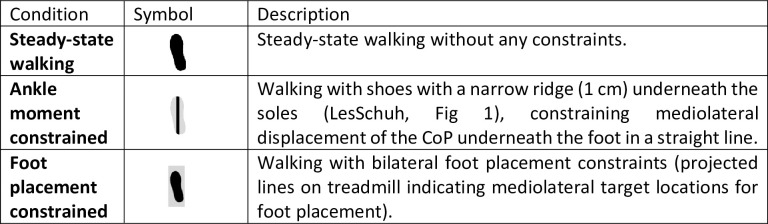
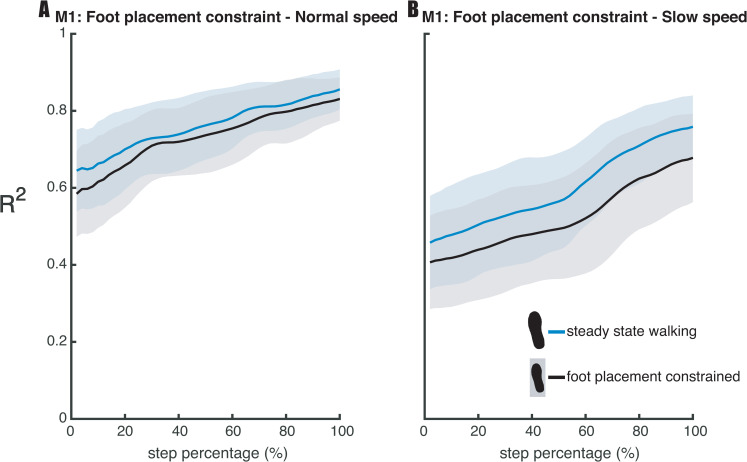
Step-by-step foot placement control, relative to the center of mass (CoM) kinematic state, is generally considered a dominant mechanism for maintenance of gait stability. By adequate (mediolateral) positioning of the center of pressure with respect to the CoM, the ground reaction force generates a moment that prevents falling. In healthy individuals, foot placement is complemented mainly by ankle moment control ensuring stability. To evaluate possible compensatory relationships between step-by-step foot placement and complementary ankle moments, we investigated the degree of (active) foot placement control during steady-state walking, and under either foot placement-, or ankle moment constraints. Thirty healthy participants walked on a treadmill, while full-body kinematics, ground reaction forces and EMG activities were recorded. As a replication of earlier findings, we first showed step-by-step foot placement is associated with preceding CoM state and hip ab-/adductor activity during steady-state walking. Tight control of foot placement appears to be important at normal walking speed because there was a limited change in the degree of foot placement control despite the presence of a foot placement constraint. At slow speed, the degree of foot placement control decreased substantially, suggesting that tight control of foot placement is less essential when walking slowly. Step-by-step foot placement control was not tightened to compensate for constrained ankle moments. Instead compensation was achieved through increases in step width and stride frequency.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures




References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
Research Materials
