

Active inference on discrete state-spaces: A synthesis
- PMID: 33343039
- PMCID: PMC7732703
- DOI: 10.1016/j.jmp.2020.102447
Active inference on discrete state-spaces: A synthesis
Abstract
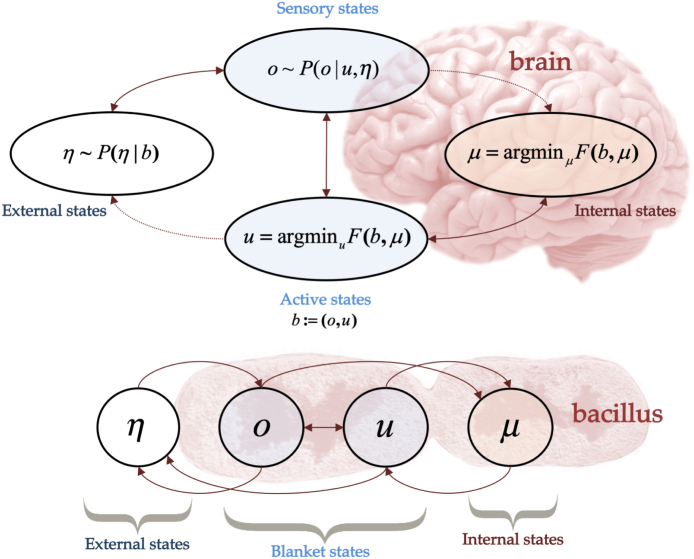
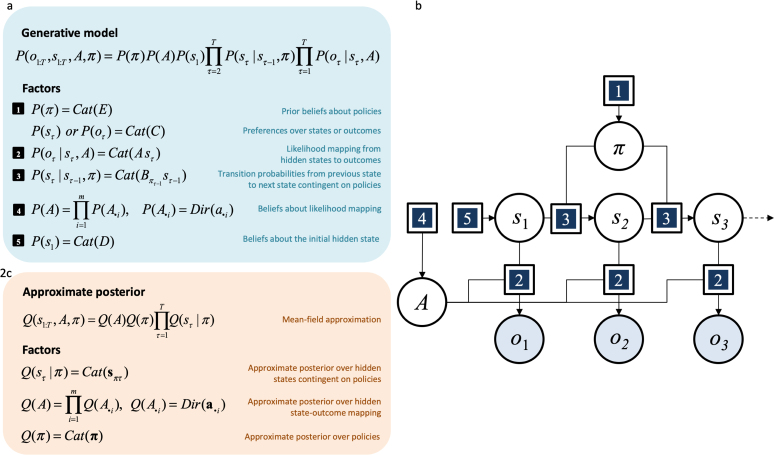
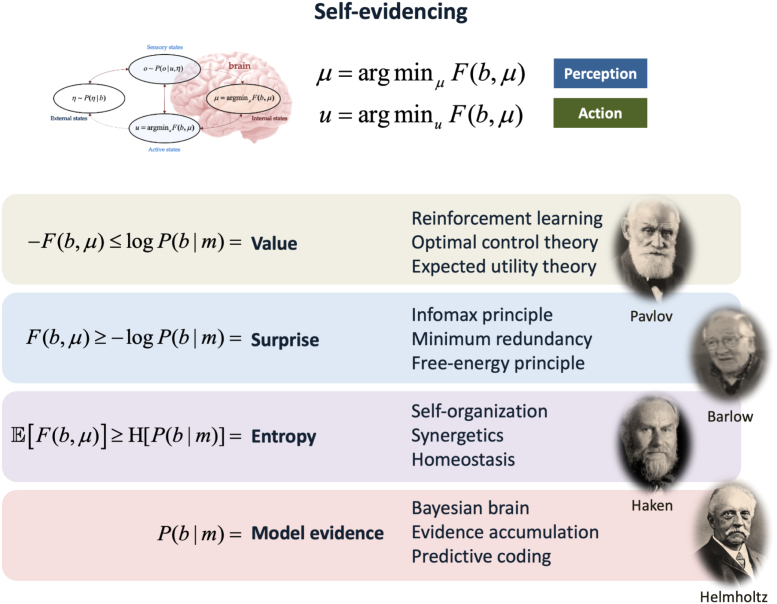
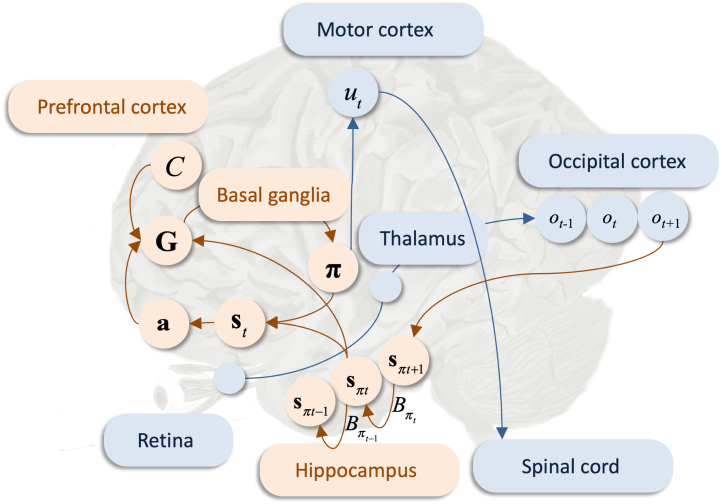
Active inference is a normative principle underwriting perception, action, planning, decision-making and learning in biological or artificial agents. From its inception, its associated process theory has grown to incorporate complex generative models, enabling simulation of a wide range of complex behaviours. Due to successive developments in active inference, it is often difficult to see how its underlying principle relates to process theories and practical implementation. In this paper, we try to bridge this gap by providing a complete mathematical synthesis of active inference on discrete state-space models. This technical summary provides an overview of the theory, derives neuronal dynamics from first principles and relates this dynamics to biological processes. Furthermore, this paper provides a fundamental building block needed to understand active inference for mixed generative models; allowing continuous sensations to inform discrete representations. This paper may be used as follows: to guide research towards outstanding challenges, a practical guide on how to implement active inference to simulate experimental behaviour, or a pointer towards various in-silico neurophysiological responses that may be used to make empirical predictions.
Keywords: Active inference; Free energy principle; Markov decision process; Mathematical review; Process theory; Variational Bayesian inference.
© 2020 The Authors.
Conflict of interest statement
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Figures


References
-
- Ackley D.H., Hinton G.E., Sejnowski T.J. A learning algorithm for Boltzmann machines. Cognitive Science. 1985;9(1):147–169. doi: 10.1016/S0364-0213(85)80012-4. - DOI
-
- Allenby G.M., Rossi P.E., McCulloch R.E. Hierarchical Bayes models: A practitioners guide. Journal of Bayesian Applications in Marketing. 2005
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous