

Usability of cooperative surgical telemanipulation for bone milling tasks
- PMID: 33355895
- PMCID: PMC7880914
- DOI: 10.1007/s11548-020-02296-8
Usability of cooperative surgical telemanipulation for bone milling tasks
Abstract
Purpose: Cooperative surgical systems enable humans and machines to combine their individual strengths and collaborate to improve the surgical outcome. Cooperative telemanipulated systems offer the widest spectrum of cooperative functionalities, because motion scaling is possible. Haptic guidance can be used to assist surgeons and haptic feedback makes acting forces at the slave side transparent to the operator, however, overlapping and masking of forces needs to be avoided. This study evaluates the usability of a cooperative surgical telemanipulator in a laboratory setting.
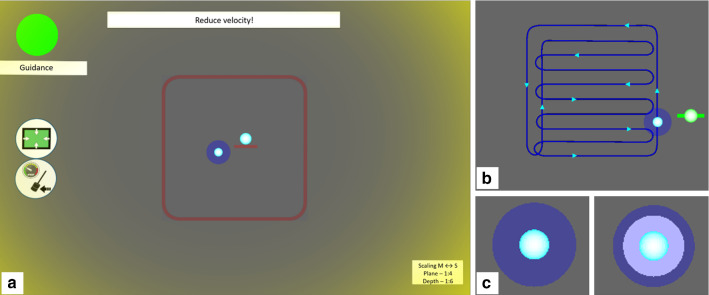
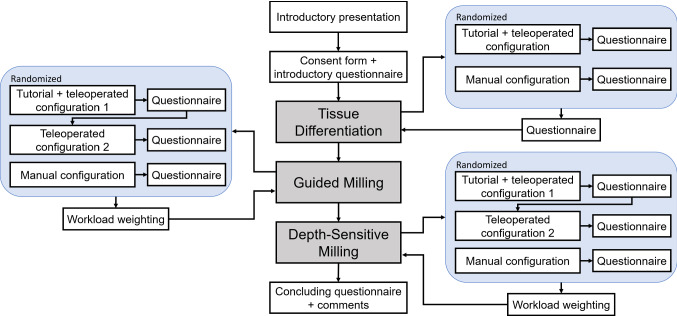
Methods: Three experiments were designed and conducted for characteristic surgical task scenarios derived from field studies in orthopedics and neurosurgery to address bone tissue differentiation, guided milling and depth sensitive milling. Interaction modes were designed to ensure that no overlapping or masking of haptic guidance and haptic feedback occurs when allocating information to the haptic channel. Twenty participants were recruited to compare teleoperated modes, direct manual execution and an exemplary automated milling with respect to usability.
Results: Participants were able to differentiate compact and cancellous bone, both directly manually and teleoperatively. Both telemanipulated modes increased effectiveness measured by the mean absolute depth and contour error for guided and depth sensitive millings. Efficiency is decreased if solely a boundary constraint is used in hard material, while a trajectory guidance and manual milling perform similarly. With respect to subjective user satisfaction trajectory guidance is rated best for guided millings followed by boundary constraints and the direct manual interaction. Haptic feedback only improved subjective user satisfaction.
Conclusion: A cooperative surgical telemanipulator can improve effectiveness and efficiency close to an automated execution and enhance user satisfaction compared to direct manual interaction. At the same time, the surgeon remains part of the control loop and is able to adjust the surgical plan according to the intraoperative situation and his/her expertise at any time.
Keywords: Haptics; Human machine interaction; Robotic manipulators; Shared control; Surgical robotics; Synergistic systems.
Conflict of interest statement
The authors declare that they have no conflicts of interest.
Figures






References
-
- Wickens CD (1984) Eng Psychol Hum Perform
-
- Taylor RH. A perspective on medical robotics. Proc IEEE. 2006;94:1652–1664. doi: 10.1109/JPROC.2006.880669. - DOI
-
- Schleer P, Drobinsky S, de la Fuente M, Radermacher K (2019) Toward versatile cooperative surgical robotics: a review and future challenges. Int J Comput Assist Radiol Surg, pp 1–14 - PubMed
-
- Wickens CD, Hollands JG, Banbury S, Parasuraman R (2013) Engineering Psychology and Human Performance. Pearson
MeSH terms
LinkOut - more resources
Full Text Sources
