

Liquid Crystal Elastomer-Based Magnetic Composite Films for Reconfigurable Shape-Morphing Soft Miniature Machines
- PMID: 33448077
- PMCID: PMC7610459
- DOI: 10.1002/adma.202006191
Liquid Crystal Elastomer-Based Magnetic Composite Films for Reconfigurable Shape-Morphing Soft Miniature Machines
Abstract
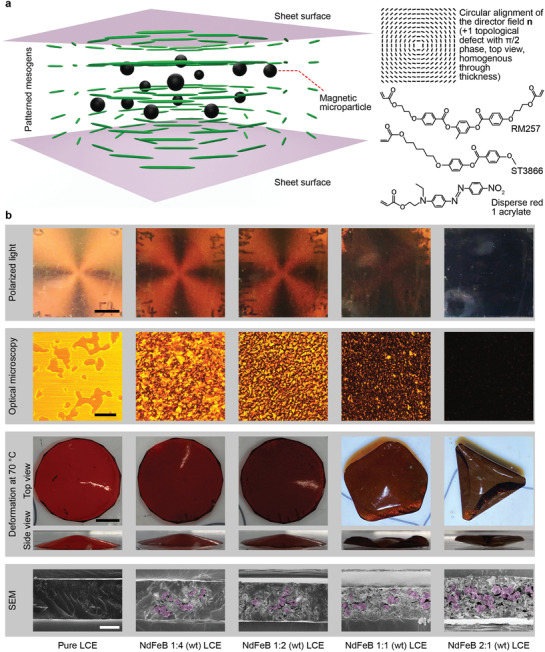
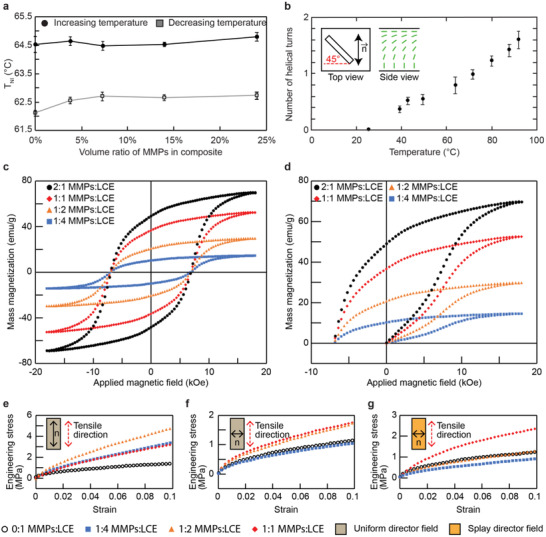
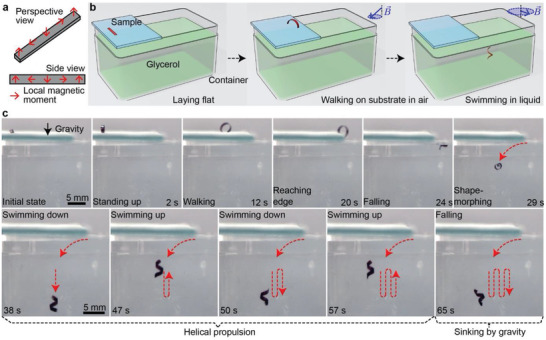
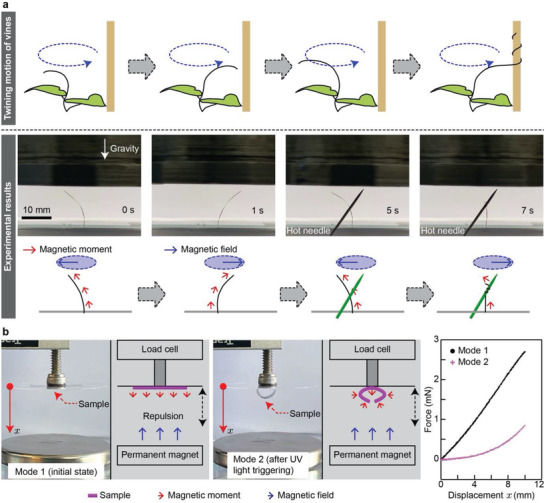
Stimuli-responsive and active materials promise radical advances for many applications. In particular, soft magnetic materials offer precise, fast, and wireless actuation together with versatile functionality, while liquid crystal elastomers (LCEs) are capable of large reversible and programmable shape-morphing with high work densities in response to various environmental stimuli, e.g., temperature, light, and chemical solutions. Integrating the orthogonal stimuli-responsiveness of these two kinds of active materials could potentially enable new functionalities and future applications. Here, magnetic microparticles (MMPs) are embedded into an LCE film to take the respective advantages of both materials without compromising their independent stimuli-responsiveness. This composite material enables reconfigurable magnetic soft miniature machines that can self-adapt to a changing environment. In particular, a miniature soft robot that can autonomously alter its locomotion mode when it moves from air to hot liquid, a vine-like filament that can sense and twine around a support, and a light-switchable magnetic spring are demonstrated. The integration of LCEs and MMPs into monolithic structures introduces a new dimension in the design of soft machines and thus greatly enhances their use in applications in complex environments, especially for miniature soft robots, which are self-adaptable to environmental changes while being remotely controllable.
Keywords: liquid crystal elastomers; magnetic composites; programmable shape-morphing; soft machines; stimuli-responsive materials.
© 2021 The Authors. Advanced Materials published by Wiley-VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
Wirelessly Actuated Thermo- and Magneto-Responsive Soft Bimorph Materials with Programmable Shape-Morphing.Adv Mater. 2021 Jul;33(30):e2100336. doi: 10.1002/adma.202100336. Epub 2021 May 28. Adv Mater. 2021. PMID: 34048125 Free PMC article.
-
Liquid Crystal Elastomer-Liquid Metal Composite: Ultrafast, Untethered, and Programmable Actuation by Induction Heating.Adv Mater. 2024 Aug;36(34):e2302765. doi: 10.1002/adma.202302765. Epub 2023 Oct 27. Adv Mater. 2024. PMID: 37656872
-
Reversible Curvature Reversal of Monolithic Liquid Crystal Elastomer Film and Its Smart Valve Application.Macromol Rapid Commun. 2021 Nov;42(21):e2100404. doi: 10.1002/marc.202100404. Epub 2021 Aug 30. Macromol Rapid Commun. 2021. PMID: 34418205
-
Structure-induced Intelligence of Liquid Crystal Elastomers.Chemistry. 2023 Jul 6;29(38):e202301027. doi: 10.1002/chem.202301027. Epub 2023 Jun 5. Chemistry. 2023. PMID: 37129950 Review.
-
4D Printing of Shape-Morphing Liquid Crystal Elastomers.Chem Bio Eng. 2024 Jun 3;1(6):488-515. doi: 10.1021/cbe.4c00027. eCollection 2024 Jul 25. Chem Bio Eng. 2024. PMID: 39974607 Free PMC article. Review.
Cited by
-
Multimodal and Multistimuli 4D-Printed Magnetic Composite Liquid Crystal Elastomer Actuators.ACS Appl Mater Interfaces. 2024 Jan 17;16(2):2704-2715. doi: 10.1021/acsami.3c14607. Epub 2023 Dec 27. ACS Appl Mater Interfaces. 2024. PMID: 38150329 Free PMC article.
-
The Light-Fueled Self-Rotation of a Liquid Crystal Elastomer Fiber-Propelled Slider on a Circular Track.Polymers (Basel). 2024 Aug 9;16(16):2263. doi: 10.3390/polym16162263. Polymers (Basel). 2024. PMID: 39204483 Free PMC article.
-
Four-Dimensional Stimuli-Responsive Hydrogels Micro-Structured via Femtosecond Laser Additive Manufacturing.Micromachines (Basel). 2021 Dec 27;13(1):32. doi: 10.3390/mi13010032. Micromachines (Basel). 2021. PMID: 35056197 Free PMC article.
-
Evolving from Laboratory Toys towards Life-Savers: Small-Scale Magnetic Robotic Systems with Medical Imaging Modalities.Micromachines (Basel). 2021 Oct 26;12(11):1310. doi: 10.3390/mi12111310. Micromachines (Basel). 2021. PMID: 34832722 Free PMC article. Review.
-
Filled Elastomers: Mechanistic and Physics-Driven Modeling and Applications as Smart Materials.Polymers (Basel). 2024 May 13;16(10):1387. doi: 10.3390/polym16101387. Polymers (Basel). 2024. PMID: 38794580 Free PMC article. Review.
References
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
