

Oncilla Robot: A Versatile Open-Source Quadruped Research Robot With Compliant Pantograph Legs
- PMID: 33500946
- PMCID: PMC7805741
- DOI: 10.3389/frobt.2018.00067
Oncilla Robot: A Versatile Open-Source Quadruped Research Robot With Compliant Pantograph Legs
Abstract
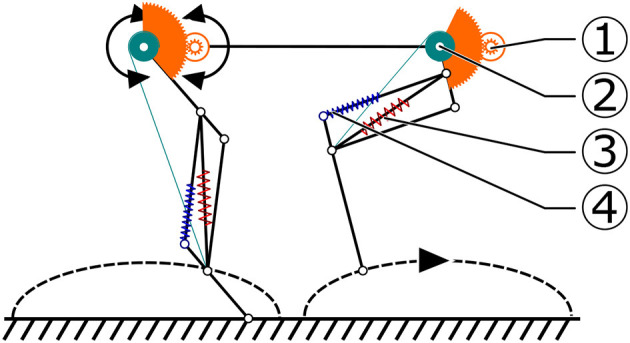
We present Oncilla robot, a novel mobile, quadruped legged locomotion machine. This large-cat sized, 5.1 kg robot is one of a kind of a recent, bioinspired legged robot class designed with the capability of model-free locomotion control. Animal legged locomotion in rough terrain is clearly shaped by sensor feedback systems. Results with Oncilla robot show that agile and versatile locomotion is possible without sensory signals to some extend, and tracking becomes robust when feedback control is added (Ajallooeian, 2015). By incorporating mechanical and control blueprints inspired from animals, and by observing the resulting robot locomotion characteristics, we aim to understand the contribution of individual components. Legged robots have a wide mechanical and control design parameter space, and a unique potential as research tools to investigate principles of biomechanics and legged locomotion control. But the hardware and controller design can be a steep initial hurdle for academic research. To facilitate the easy start and development of legged robots, Oncilla-robot's blueprints are available through open-source. The robot's locomotion capabilities are shown in several scenarios. Specifically, its spring-loaded pantographic leg design compensates for overdetermined body and leg postures, i.e., during turning maneuvers, locomotion outdoors, or while going up and down slopes. The robot's active degree of freedom allow tight and swift direction changes, and turns on the spot. Presented hardware experiments are conducted in an open-loop manner, with little control and computational effort. For more versatile locomotion control, Oncilla-robot can sense leg joint rotations, and leg-trunk forces. Additional sensors can be included for feedback control with an open communication protocol interface. The robot's customized actuators are designed for robust actuation, and efficient locomotion. It trots with a cost of transport of 3.2 J/(Nm), at a speed of 0.63 m s-1 (Froude number 0.25). The robot trots inclined slopes up to 10°, at 0.25 m s-1. The multi-body Webots model of Oncilla robot, and Oncilla robot's extensive software architecture enables users to design and test scenarios in simulation. Controllers can directly be transferred to the real robot. Oncilla robot's blueprints are open-source published (hardware GLP v3, software LGPL v3).
Keywords: multiple gaits; open-loop; open-source; pantograph; pattern generator; quadruped; robot; turning.
Copyright © 2018 Spröwitz, Tuleu, Ajallooeian, Vespignani, Möckel, Eckert, D'Haene, Degrave, Nordmann, Schrauwen, Steil and Ijspeert.
Figures











References
-
- Ajallooeian M. (2015). Pattern Generation for Rough Terrain Locomotion with Quadrupedal Robots: Morphed Oscillators and Sensory Feedback. PhD thesis, STI, Lausanne.
-
- Ajallooeian M., Gay S., Tuleu A., Spröwitz A., Ijspeert A. J. (2013a). Modular control of limit cycle locomotion over unperceived rough terrain, in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Tokyo: IEEE; ), 3390–3397.
-
- Ajallooeian M., Pouya S., Spröwitz A., Ijspeert A. J. (2013b). Central pattern generators augmented with virtual model control for quadruped rough terrain locomotion, in 2013 IEEE International Conference on Robotics and Automation (ICRA) (Karlsruhe: IEEE; ), 3321–3328.
-
- Ajallooeian M., van den Kieboom J., Mukovskiy A., Giese M. A., Ijspeert A. J. (2013c). A general family of morphed nonlinear phase oscillators with arbitrary limit cycle shape. Phys. D 263, 41–56. 10.1016/j.physd.2013.07.016 - DOI
LinkOut - more resources
Full Text Sources
Miscellaneous