

Design and Evaluation of a Percutaneous Fragment Manipulation Device for Minimally Invasive Fracture Surgery
- PMID: 33501118
- PMCID: PMC7805645
- DOI: 10.3389/frobt.2019.00103
Design and Evaluation of a Percutaneous Fragment Manipulation Device for Minimally Invasive Fracture Surgery
Abstract
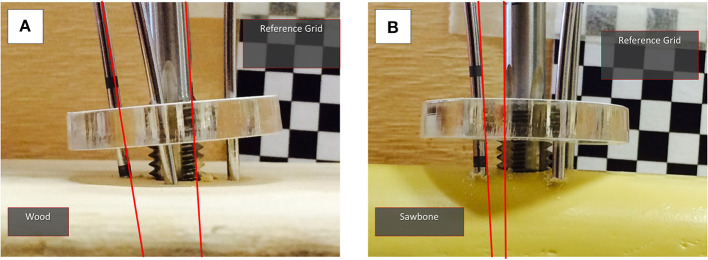
Reduction of fractures in the minimally invasive (MI) manner can avoid risks associated with open fracture surgery. The MI approach requires specialized tools called percutaneous fragment manipulation devices (PFMD) to enable surgeons to safely grasp and manipulate fragments. PFMDs developed for long-bone manipulation are not suitable for intra-articular fractures where small bone fragments are involved. With this study, we offer a solution to potentially move the current fracture management practice closer to the use of a MI approach. We investigate the design and testing of a new PFMD design for manual as well as robot-assisted manipulation of small bone fragments. This new PFMD design is simulated using FEA in three loading scenarios (force/torque: 0 N/2.6 Nm, 75.7 N/3.5 N, 147 N/6.8 Nm) assessing structural properties, breaking points, and maximum bending deformations. The PFMD is tested in a laboratory setting on Sawbones models (0 N/2.6 Nm), and on ex-vivo swine samples (F = 80 N ± 8 N, F = 150 ± 15 N). A commercial optical tracking system was used for measuring PFMD deformations under external loading and the results were verified with an electromagnetic tracking system. The average error difference between the tracking systems was 0.5 mm, being within their accuracy limits. Final results from reduction maneuvers performed both manually and with the robot assistance are obtained from 7 human cadavers with reduction forces in the range of (F = 80 N ± 8 N, F = 150 ± 15 N, respectively). The results show that structurally, the system performs as predicted by the simulation results. The PFMD did not break during ex-vivo and cadaveric trials. Simulation, laboratory, and cadaveric tests produced similar results regarding the PFMD bending. Specifically, for forces applied perpendicularly to the axis of the PFMD of 80 N ± 8 N deformations of 2.8, 2.97, and 3.06 mm are measured on the PFMD, while forces of 150 ± 15 N produced deformations of 5.8, 4.44, and 5.19 mm. This study has demonstrated that the proposed PFMD undergoes predictable deformations under typical bone manipulation loads. Testing of the device on human cadavers proved that these deformations do not affect the anatomic reduction quality. The PFMD is, therefore, suitable to reliably achieve and maintain fracture reductions, and to, consequently, allow external fracture fixation.
Keywords: biomechanical testing; cadaveric trials; fracture reduction; robot-assisted orthopedic surgery; surgical tracking.
Copyright © 2019 Georgilas, Dagnino, Alves Martins, Tarassoli, Morad, Georgilas, Koehler, Atkins and Dogramadzi.
Figures




Similar articles
-
Quantification of manipulation forces needed for robot-assisted reduction of the ankle syndesmosis: an initial cadaveric study.Int J Comput Assist Radiol Surg. 2022 Dec;17(12):2263-2267. doi: 10.1007/s11548-022-02705-0. Epub 2022 Aug 20. Int J Comput Assist Radiol Surg. 2022. PMID: 35986832 Free PMC article.
-
Design and evaluation of an intelligent reduction robot system for the minimally invasive reduction in pelvic fractures.J Orthop Surg Res. 2022 Apr 4;17(1):205. doi: 10.1186/s13018-022-03089-2. J Orthop Surg Res. 2022. PMID: 35379278 Free PMC article.
-
Preliminary analysis of force-torque measurements for robot-assisted fracture surgery.Annu Int Conf IEEE Eng Med Biol Soc. 2015 Aug;2015:4902-5. doi: 10.1109/EMBC.2015.7319491. Annu Int Conf IEEE Eng Med Biol Soc. 2015. PMID: 26737391
-
Biomechanical and biological aspects of defect treatment in fractures using helical plates.Acta Chir Orthop Traumatol Cech. 2014;81(4):267-71. Acta Chir Orthop Traumatol Cech. 2014. PMID: 25137496 Review.
-
Intelligent robot-assisted minimally invasive reduction system for reduction of unstable pelvic fractures.Injury. 2023 Feb;54(2):604-614. doi: 10.1016/j.injury.2022.11.001. Epub 2022 Nov 4. Injury. 2023. PMID: 36371315 Review.
Cited by
-
Development of a robot-assisted reduction and rehabilitation system for distal radius fractures.Front Bioeng Biotechnol. 2024 Jan 10;11:1342229. doi: 10.3389/fbioe.2023.1342229. eCollection 2023. Front Bioeng Biotechnol. 2024. PMID: 38268941 Free PMC article.
-
Computer-aided robotics for applications in fracture reduction surgery: Advances, challenges, and opportunities.iScience. 2024 Dec 3;28(1):111509. doi: 10.1016/j.isci.2024.111509. eCollection 2025 Jan 17. iScience. 2024. PMID: 39811638 Free PMC article. Review.
References
-
- Andrianne Y., Wagenknecht M., Donkerwolcke M., Zurbuchen C., Burny F. (1987). External fixation pin: an in vitro general investigation. Orthopedics 10, 1507–1516. - PubMed
-
- AO Foundation (2015). Distal Femur Fracture - Reduction and Fixation. Davos: AO Foundation.
Grants and funding
LinkOut - more resources
Full Text Sources