

Occurrence and Type of Adverse Events During the Use of Stationary Gait Robots-A Systematic Literature Review
- PMID: 33501319
- PMCID: PMC7805916
- DOI: 10.3389/frobt.2020.557606
Occurrence and Type of Adverse Events During the Use of Stationary Gait Robots-A Systematic Literature Review
Abstract
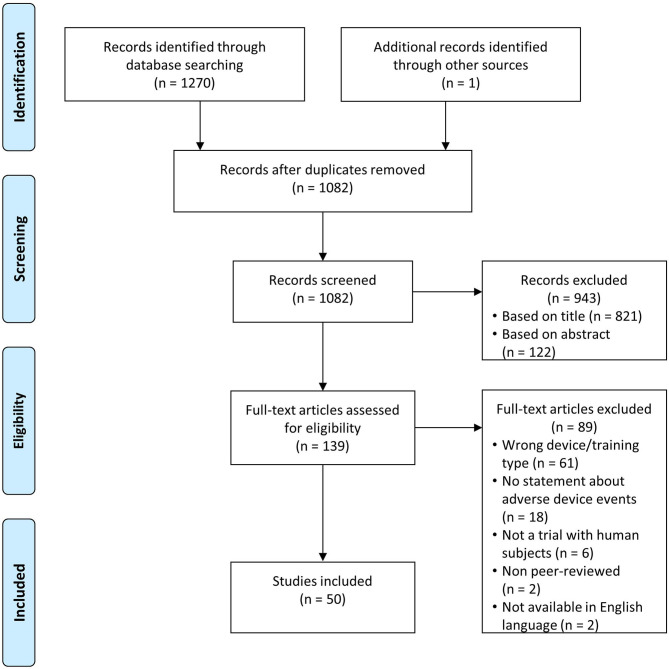
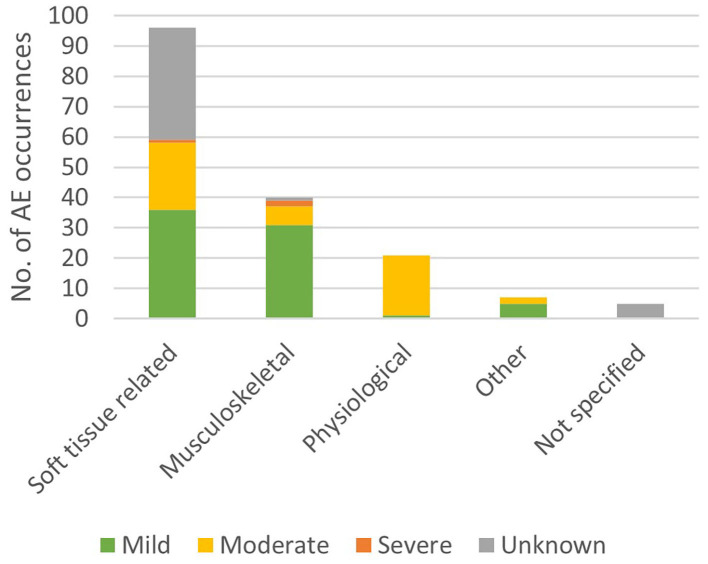
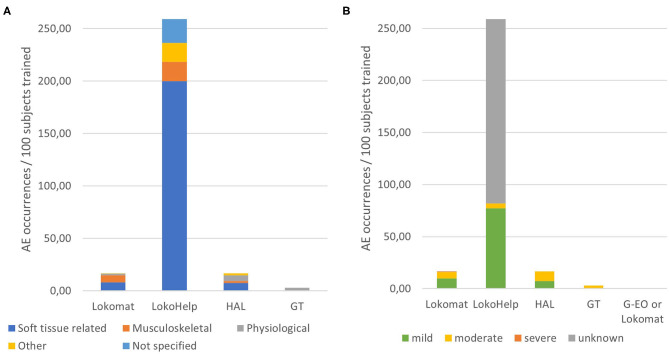
Robot-assisted gait training (RAGT) devices are used in rehabilitation to improve patients' walking function. While there are some reports on the adverse events (AEs) and associated risks in overground exoskeletons, the risks of stationary gait trainers cannot be accurately assessed. We therefore aimed to collect information on AEs occurring during the use of stationary gait robots and identify associated risks, as well as gaps and needs, for safe use of these devices. We searched both bibliographic and full-text literature databases for peer-reviewed articles describing the outcomes of stationary RAGT and specifically mentioning AEs. We then compiled information on the occurrence and types of AEs and on the quality of AE reporting. Based on this, we analyzed the risks of RAGT in stationary gait robots. We included 50 studies involving 985 subjects and found reports of AEs in 18 of those studies. Many of the AE reports were incomplete or did not include sufficient detail on different aspects, such as severity or patient characteristics, which hinders the precise counts of AE-related information. Over 169 device-related AEs experienced by between 79 and 124 patients were reported. Soft tissue-related AEs occurred most frequently and were mostly reported in end-effector-type devices. Musculoskeletal AEs had the second highest prevalence and occurred mainly in exoskeleton-type devices. We further identified physiological AEs including blood pressure changes that occurred in both exoskeleton-type and end-effector-type devices. Training in stationary gait robots can cause injuries or discomfort to the skin, underlying tissue, and musculoskeletal system, as well as unwanted blood pressure changes. The underlying risks for the most prevalent injury types include excessive pressure and shear at the interface between robot and human (cuffs/harness), as well as increased moments and forces applied to the musculoskeletal system likely caused by misalignments (between joint axes of robot and human). There is a need for more structured and complete recording and dissemination of AEs related to robotic gait training to increase knowledge on risks. With this information, appropriate mitigation strategies can and should be developed and implemented in RAGT devices to increase their safety.
Keywords: adverse event (AE); injuries (MeSH); physical human-robot interaction (pHRI); rehabilitation robotics; robot-assisted gait training; safety; stationary gait robots.
Copyright © 2020 Bessler, Prange-Lasonder, Schulte, Schaake, Prinsen and Buurke.
Figures
References
-
- Akiyama Y., Yamada Y., Ito K., Oda S., Okamoto S., Hara S. (2012). “Test method for contact safety assessment of a wearable robot -analysis of load caused by a misalignment of the knee joint,” in 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication (Paris: IEEE; ) 539–544. 10.1109/ROMAN.2012.6343807 - DOI
-
- Akiyama Y., Yamada Y., Okamoto S. (2015). Interaction forces beneath cuffs of physical assistant robots and their motion-based estimation. Adv. Robot. 29, 1315–1329. 10.1080/01691864.2015.1055799 - DOI
-
- Asbeck A. T., De Rossi S. M. M., Holt K. G., Walsh C. J. (2015). A biologically inspired soft exosuit for walking assistance. Int. J. Rob. Res. 34, 744–762. 10.1177/0278364914562476 - DOI
Publication types
LinkOut - more resources
Full Text Sources