

Multilayered electronic transfer tattoo that can enable the crease amplification effect
- PMID: 33523888
- PMCID: PMC7806229
- DOI: 10.1126/sciadv.abe3778
Multilayered electronic transfer tattoo that can enable the crease amplification effect
Abstract
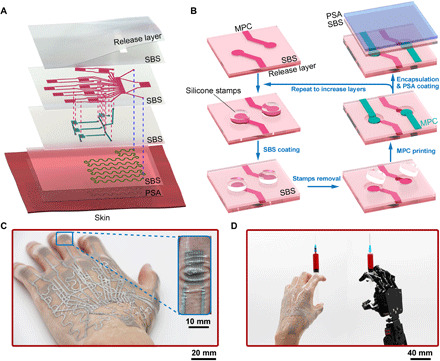
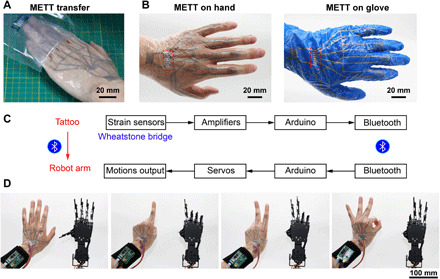
Electronic tattoos have great potential in health and movement sensing applications on the skin. However, existing electronic tattoos cannot be conformal, sticky, and multilayered at the same time. Here, we have achieved multilayered integration of the electronic tattoo that is highly stretchable (800%), conformal, and sticky. This electronic tattoo can enable the crease amplification effect, which can amplify the output signal of integrated strain sensors by three times. The tattoo can be transferred to different surfaces and form a firm attachment, where no solvent or heat is needed. The tattoo fabrication is straightforward and scalable; a layer-by-layer strategy and two materials (metal-polymer conductors and the elastomeric block copolymer) are used to fabricate the circuit module with desirable numbers of layers within the tattoo. A three-layered tattoo integrating 1 heater and 15 strain sensors is developed for temperature adjustment, movement monitoring, and remote control of robots.
Copyright © 2021 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works. Distributed under a Creative Commons Attribution NonCommercial License 4.0 (CC BY-NC).
Figures

References
-
- Lee S., Sasaki D., Kim D., Mori M., Yokota T., Lee H., Park S., Fukuda K., Sekino M., Matsuura K., Shimizu T., Someya T., Ultrasoft electronics to monitor dynamically pulsing cardiomyocytes. Nat. Nanotechnol. 14, 156–160 (2019). - PubMed
-
- Reeder J. T., Choi J., Xue Y., Gutruf P., Hanson J., Liu M., Ray T., Bandodkar A. J., Avila R., Xia W., Krishnan S., Xu S., Barnes K., Pahnke M., Ghaffari R., Huang Y., Rogers J. A., Waterproof, electronics-enabled, epidermal microfluidic devices for sweat collection, biomarker analysis, and thermography in aquatic settings. Sci. Adv. 5, eaau6356 (2019). - PMC - PubMed
-
- Chung H. U., Rwei A. Y., Hourlier-Fargette A., Xu S., Lee K. H., Dunne E. C., Xie Z., Liu C., Carlini A., Kim D. H., Ryu D., Kulikova E., Cao J., Odland I. C., Fields K. B., Hopkins B., Banks A., Ogle C., Grande D., Park J. B., Kim J., Irie M., Jang H., Lee J. H., Park Y., Kim J., Jo H. H., Hahm H., Avila R., Xu Y., Namkoong M., Kwak J. W., Suen E., Paulus M. A., Kim R. J., Parsons B. V., Human K. A., Kim S. S., Patel M., Reuther W., Kim H. S., Lee S. H., Leedle J. D., Yun Y., Rigali S., Son T., Jung I., Arafa H., Soundararajan V. R., Ollech A., Shukla A., Bradley A., Schau M., Rand C. M., Marsillio L. E., Harris Z. L., Huang Y., Hamvas A., Paller A. S., Weese-Mayer D. E., Lee J. Y., Rogers J. A., Skin-interfaced biosensors for advanced wireless physiological monitoring in neonatal and pediatric intensive-care units. Nat. Med. 26, 418–429 (2020). - PMC - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
