

Remote Actuation Systems for Fully Wearable Assistive Devices: Requirements, Selection, and Optimization for Out-of-the-Lab Application of a Hand Exoskeleton
- PMID: 33585573
- PMCID: PMC7876397
- DOI: 10.3389/frobt.2020.596185
Remote Actuation Systems for Fully Wearable Assistive Devices: Requirements, Selection, and Optimization for Out-of-the-Lab Application of a Hand Exoskeleton
Abstract
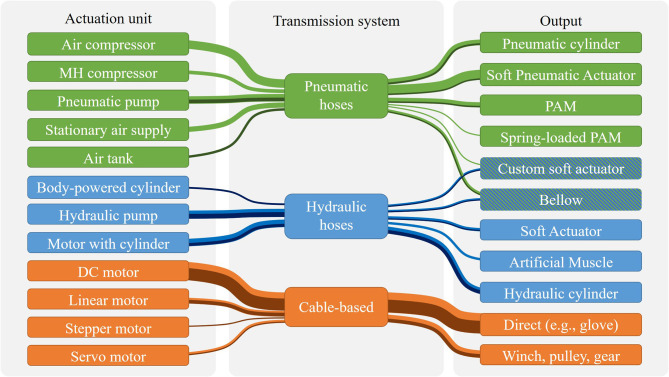
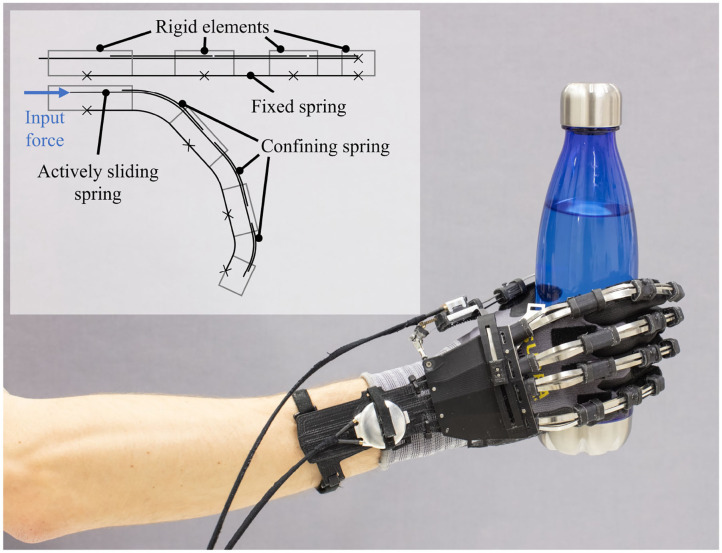
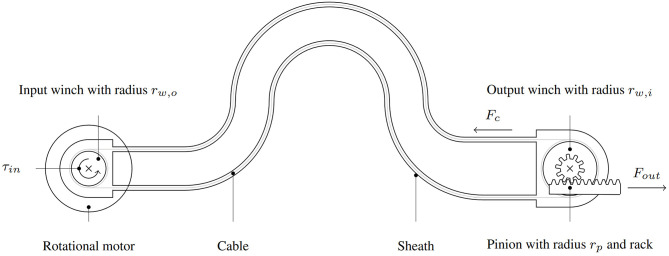
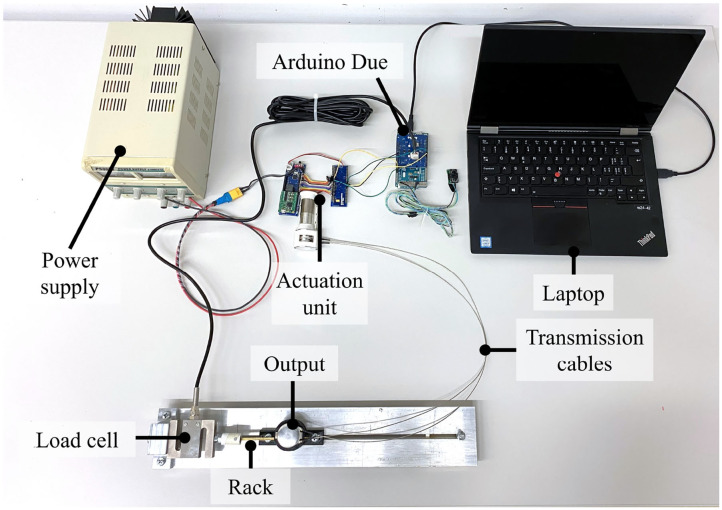
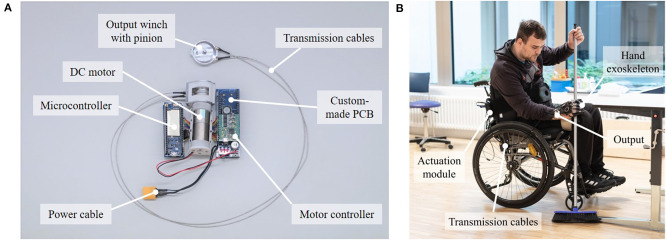
Wearable robots assist individuals with sensorimotor impairment in daily life, or support industrial workers in physically demanding tasks. In such scenarios, low mass and compact design are crucial factors for device acceptance. Remote actuation systems (RAS) have emerged as a popular approach in wearable robots to reduce perceived weight and increase usability. Different RAS have been presented in the literature to accommodate for a wide range of applications and related design requirements. The push toward use of wearable robotics in out-of-the-lab applications in clinics, home environments, or industry created a shift in requirements for RAS. In this context, high durability, ergonomics, and simple maintenance gain in importance. However, these are only rarely considered and evaluated in research publications, despite being drivers for device abandonment by end-users. In this paper, we summarize existing approaches of RAS for wearable assistive technology in a literature review and compare advantages and disadvantages, focusing on specific evaluation criteria for out-of-the-lab applications to provide guidelines for the selection of RAS. Based on the gained insights, we present the development, optimization, and evaluation of a cable-based RAS for out-of-the-lab applications in a wearable assistive soft hand exoskeleton. The presented RAS features full wearability, high durability, high efficiency, and appealing design while fulfilling ergonomic criteria such as low mass and high wearing comfort. This work aims to support the transfer of RAS for wearable robotics from controlled lab environments to out-of-the-lab applications.
Keywords: Bowden cable; assistive device; cable-driven; hand exoskeleton; out-of-the-lab; remote actuation; soft robotics; wearable robot.
Copyright © 2021 Dittli, Hofmann, Bützer, Smit, Lambercy and Gassert.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest. The handling Editor declared a past collaboration with the authors OL, RG.
Figures
References
-
- Agarwal P., Fox J., Yun Y., O'Malley M. K., Deshpande A. D. (2015). An index finger exoskeleton with series elastic actuation for rehabilitation: design, control and performance characterization. Int. J. Rob. Res. 34, 1747–1772. 10.1177/0278364915598388 - DOI
-
- Amirabdollahian F., Loureiro R., Harwin W. (2002). Minimum jerk trajectory control for rehabilitation and haptic applications, in International Conference on Robotics and Automation, Vol. 4 (Washington, DC: ), 3380–3385. 10.1109/ROBOT.2002.1014233 - DOI
-
- Asbeck A. T., De Rossi S. M. M., Holt K. G., Walsh C. J. (2015). A biologically inspired soft exosuit for walking assistance. Int. J. Rob. Res. 34, 744–762. 10.1177/0278364914562476 - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous