

Where did they not go? Considerations for generating pseudo-absences for telemetry-based habitat models
- PMID: 33596991
- PMCID: PMC7888118
- DOI: 10.1186/s40462-021-00240-2
Where did they not go? Considerations for generating pseudo-absences for telemetry-based habitat models
Abstract
Background: Habitat suitability models give insight into the ecological drivers of species distributions and are increasingly common in management and conservation planning. Telemetry data can be used in habitat models to describe where animals were present, however this requires the use of presence-only modeling approaches or the generation of 'pseudo-absences' to simulate locations where animals did not go. To highlight considerations for generating pseudo-absences for telemetry-based habitat models, we explored how different methods of pseudo-absence generation affect model performance across species' movement strategies, model types, and environments.
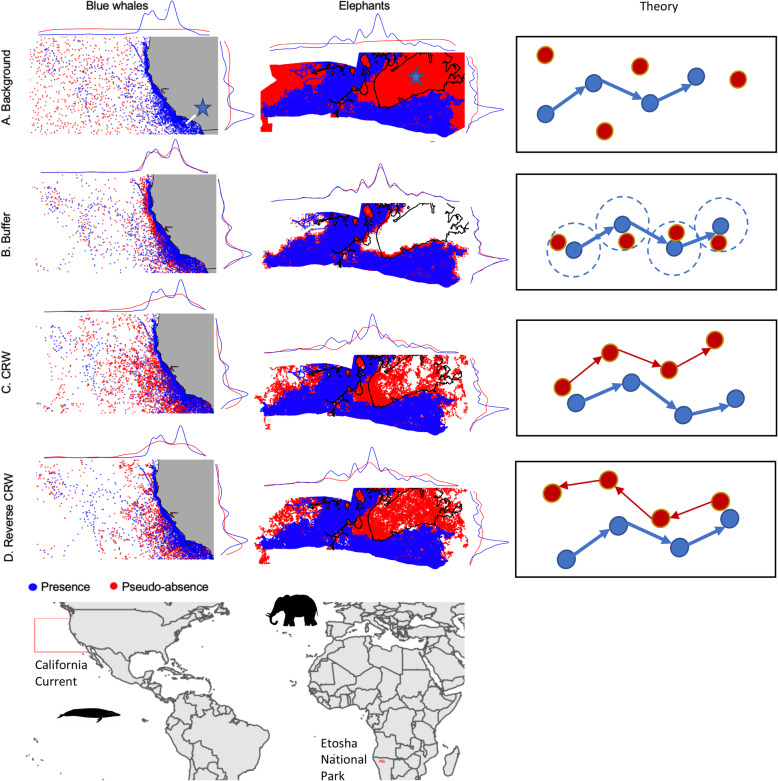
Methods: We built habitat models for marine and terrestrial case studies, Northeast Pacific blue whales (Balaenoptera musculus) and African elephants (Loxodonta africana). We tested four pseudo-absence generation methods commonly used in telemetry-based habitat models: (1) background sampling; (2) sampling within a buffer zone around presence locations; (3) correlated random walks beginning at the tag release location; (4) reverse correlated random walks beginning at the last tag location. Habitat models were built using generalised linear mixed models, generalised additive mixed models, and boosted regression trees.
Results: We found that the separation in environmental niche space between presences and pseudo-absences was the single most important driver of model explanatory power and predictive skill. This result was consistent across marine and terrestrial habitats, two species with vastly different movement syndromes, and three different model types. The best-performing pseudo-absence method depended on which created the greatest environmental separation: background sampling for blue whales and reverse correlated random walks for elephants. However, despite the fact that models with greater environmental separation performed better according to traditional predictive skill metrics, they did not always produce biologically realistic spatial predictions relative to known distributions.
Conclusions: Habitat model performance may be positively biased in cases where pseudo-absences are sampled from environments that are dissimilar to presences. This emphasizes the need to carefully consider spatial extent of the sampling domain and environmental heterogeneity of pseudo-absence samples when developing habitat models, and highlights the importance of scrutinizing spatial predictions to ensure that habitat models are biologically realistic and fit for modeling objectives.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures




References
-
- Aarts G, MacKenzie M, McConnell B, Fedak M, Matthiopoulos J. Estimating space-use and habitat preference from wildlife telemetry data. Ecography. 2008;31:140–160.
-
- Abrahms B, Welch H, Brodie S, Jacox MG, Becker EA, Bograd SJ, Irvine LM, Palacios DM, Mate BR, Hazen EL. Dynamic ensemble models to predict distributions and anthropogenic risk exposure for highly mobile species. Divers Distrib. 2019;25(8):1182–1193.
-
- Allouche O, Tsoar A, Kadmon R. Assessing the accuracy of species distribution models: prevalence, kappa and the true skill statistic (TSS) J Appl Ecol. 2006;43:1223–1232.
LinkOut - more resources
Full Text Sources
Other Literature Sources
