

Coordination of Axial Trunk Rotations During Gait in Low Back Pain. A Narrative Review
- PMID: 33603923
- PMCID: PMC7877281
- DOI: 10.2478/hukin-2020-0085
Coordination of Axial Trunk Rotations During Gait in Low Back Pain. A Narrative Review
Abstract
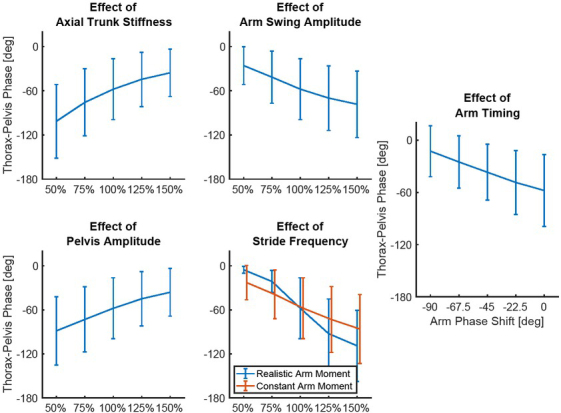
Chronic low back pain patients have been observed to show a reduced shift of thorax-pelvis relative phase towards out-of-phase movement with increasing speed compared to healthy controls. Here, we review the literature on this phase shift in patients with low back pain and we analyze the results presented in literature in view of the theoretical motivations to assess this phenomenon. Initially, based on the dynamical systems approach to movement coordination, the shift in thorax-pelvis relative phase with speed was studied as a self-organizing transition. However, the phase shift is gradual, which does not match a self-organizing transition. Subsequent emphasis in the literature therefore shifted to a motivation based on biomechanics. The change in relative phase with low back pain was specifically linked to expected changes in trunk stiffness due to 'guarded behavior'. We found that thorax-pelvis relative phase is affected by several interacting factors, including active drive of thorax rotation through trunk muscle activity, stride frequency and the magnitude of pelvis rotations. Large pelvis rotations and high stride frequency observed in low back pain patients may contribute to the difference between patients and controls. This makes thorax-pelvis relative phase a poor proxy of trunk stiffness. In conclusion, thorax-pelvis relative phase cannot be considered as a collective variable reflecting the orderly behaviour of a complex underlying system, nor is it a marker of specific changes in trunk biomechanics. The fact that it is affected by multiple factors may explain the considerable between-subject variance of this measure in low back pain patients and healthy controls alike.
Keywords: coordination; gait; low back pain; relative phase; trunk.
© 2021 Jaap H. van Dieën, Maarten R. Prins, Sjoerd M. Bruijn, Wen Hua Wu, Bowei Liang, Claudine J.C. Lamoth, Onno G. Meijer, published by Sciendo.
Figures
References
-
- Beek P.J., Peper C.E., Stegeman D.F.. Dynamical models of movement coordination. Human Movement Science. 1995;14:573–608.
-
- Bruijn S.M., Meijer O.G., van Dieen J.H., Kingma I., Lamoth C.J.. Coordination of leg swing, thorax rotations, and pelvis rotations during gait: the organisation of total body angular momentum. Gait Posture. 2008;27:455–462. - PubMed
-
- Byblow W.D., Chua R., Goodman D.. Asymmetries in Coupling Dynamics of Perception and Action. J Mot Behav. 1995;27:123–137. - PubMed
-
- Crosbie J., Vachalathiti R., Smith R.. Patterns of spinal motion during walking. Gait Posture. 1997;5:6–12.
LinkOut - more resources
Full Text Sources
Other Literature Sources