

The Mars 2020 Perseverance Rover Mast Camera Zoom (Mastcam-Z) Multispectral, Stereoscopic Imaging Investigation
- PMID: 33612866
- PMCID: PMC7883548
- DOI: 10.1007/s11214-020-00755-x
The Mars 2020 Perseverance Rover Mast Camera Zoom (Mastcam-Z) Multispectral, Stereoscopic Imaging Investigation
Abstract
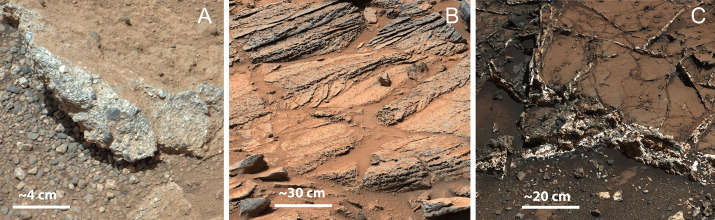
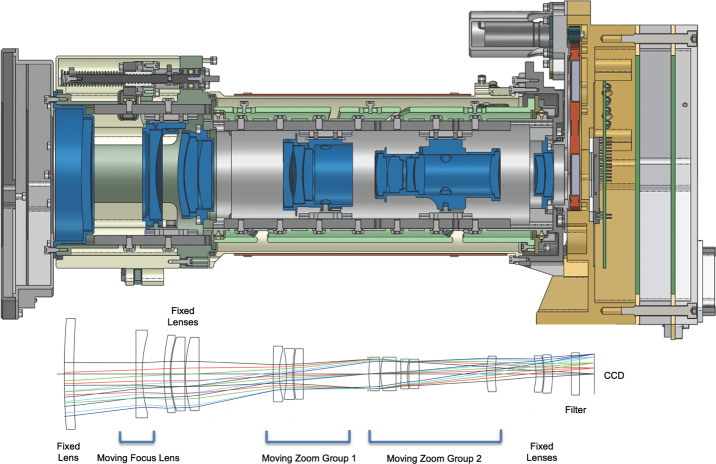
Mastcam-Z is a multispectral, stereoscopic imaging investigation on the Mars 2020 mission's Perseverance rover. Mastcam-Z consists of a pair of focusable, 4:1 zoomable cameras that provide broadband red/green/blue and narrowband 400-1000 nm color imaging with fields of view from 25.6° × 19.2° (26 mm focal length at 283 μrad/pixel) to 6.2° × 4.6° (110 mm focal length at 67.4 μrad/pixel). The cameras can resolve (≥ 5 pixels) ∼0.7 mm features at 2 m and ∼3.3 cm features at 100 m distance. Mastcam-Z shares significant heritage with the Mastcam instruments on the Mars Science Laboratory Curiosity rover. Each Mastcam-Z camera consists of zoom, focus, and filter wheel mechanisms and a 1648 × 1214 pixel charge-coupled device detector and electronics. The two Mastcam-Z cameras are mounted with a 24.4 cm stereo baseline and 2.3° total toe-in on a camera plate ∼2 m above the surface on the rover's Remote Sensing Mast, which provides azimuth and elevation actuation. A separate digital electronics assembly inside the rover provides power, data processing and storage, and the interface to the rover computer. Primary and secondary Mastcam-Z calibration targets mounted on the rover top deck enable tactical reflectance calibration. Mastcam-Z multispectral, stereo, and panoramic images will be used to provide detailed morphology, topography, and geologic context along the rover's traverse; constrain mineralogic, photometric, and physical properties of surface materials; monitor and characterize atmospheric and astronomical phenomena; and document the rover's sample extraction and caching locations. Mastcam-Z images will also provide key engineering information to support sample selection and other rover driving and tool/instrument operations decisions.
Keywords: Jezero crater; Mars; Mars 2020 mission; Perseverance rover; Space imaging; Space instrumentation.
© The Author(s) 2020.
Conflict of interest statement
Conflicts of interest/Competing interestsThe authors declare that they have no conflict of interest.
Figures








References
-
- Adams J.B. Interpretation of visible and near-infrared diffuse reflectance spectra of pyroxenes and other rock-forming minerals. In: Karr C., editor. Infrared and Raman Spectroscopy of Lunar and Terrestrial Minerals. New York: Academic Press; 1975. pp. 91–116.
-
- Altheide T., Chevrier V., Nicholson C., Denson J. Experimental investigation of the stability and evaporation of sulfate and chloride brines on Mars. Earth Planet. Sci. Lett. 2009;282(1–4):69–78. doi: 10.1016/j.epsl.2009.03.002. - DOI
-
- Anderson R.S., Anderson S.P. Geomorphology: The Mechanics and Chemistry of Landscapes. Cambridge: Cambridge University Press; 2011.
-
- Arvidson R.E., Ruff S.W., Morris R.V., Ming D.W., Crumpler L.S., Yen A.S., Squyres S.W., Sullivan R.J., Bell J.F., III, Cabrol N.A., Clark B.C., Farrand W.H., Gellert R., Greenberger R., Grant J.A., Guinness E.A., Herkenhoff K.E., Hurowitz J.A., Johnson J.R., Klingelhöfer G., Lewis K.W., Li R., McCoy T.J., Moersch J., McSween H.Y., Murchie S.L., Schmidt M., Schröder C., Wang A., Wiseman S., Madsen M.B., Goetz W., McLennan S.M. Spirit Mars Rover Mission to the Columbia Hills, Gusev Crater: mission overview and selected results from the Cumberland Ridge to Home Plate. J. Geophys. Res. 2008;113:E12S33. doi: 10.1029/2008JE003183. - DOI
-
- Arvidson R.E., Ashley J.W., Bell J.F., Chojnacki M., Cohen J., Economou T.E., Farrand W.H., Fergason R., Fleischer I., Geissler P., Gellert R., Golombek M.P., Grotzinger J.P., Guinness E.A., Haberle R.M., Herkenhoff K.E., Herman J.A., Iagnemma K.D., Jolliff B.L., Johnson J.R., Klingelhöfer G., Knoll A.H., Knudson A.T., Li R., McLennan S.M., Mittlefehldt D.W., Morris R.V., Parker T.J., Rice M.S., Schröder C., Soderblom L.A., Squyres S.W., Sullivan R.J., Wolff M.J. Opportunity Mars Rover mission: overview and selected results from Purgatory ripple to traverses to Endeavour crater. J. Geophys. Res. 2011;116:E00F15. doi: 10.1029/2010JE003746. - DOI
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous