

Ultrasound Doppler-guided real-time navigation of a magnetic microswarm for active endovascular delivery
- PMID: 33637532
- PMCID: PMC7909881
- DOI: 10.1126/sciadv.abe5914
Ultrasound Doppler-guided real-time navigation of a magnetic microswarm for active endovascular delivery
Abstract
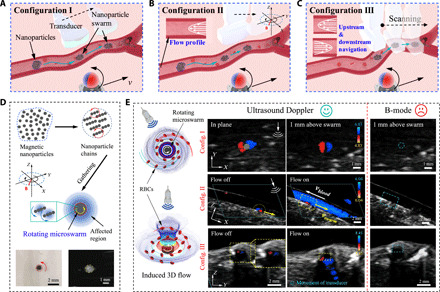
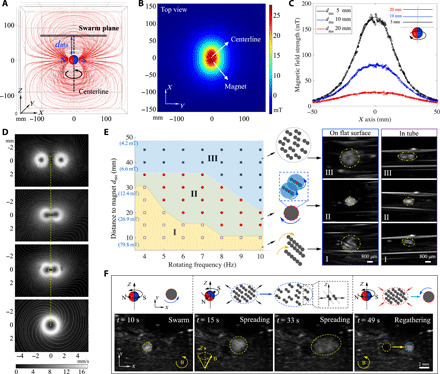
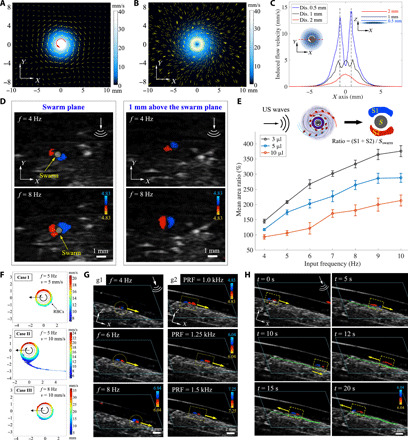
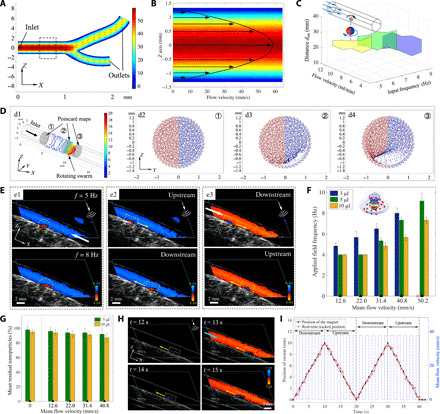
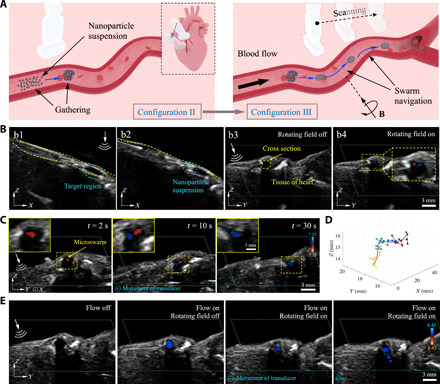
Swarming micro/nanorobots offer great promise in performing targeted delivery inside diverse hard-to-reach environments. However, swarm navigation in dynamic environments challenges delivery capability and real-time swarm localization. Here, we report a strategy to navigate a nanoparticle microswarm in real time under ultrasound Doppler imaging guidance for active endovascular delivery. A magnetic microswarm was formed and navigated near the boundary of vessels, where the reduced drag of blood flow and strong interactions between nanoparticles enable upstream and downstream navigation in flowing blood (mean velocity up to 40.8 mm/s). The microswarm-induced three-dimensional blood flow enables Doppler imaging from multiple viewing configurations and real-time tracking in different environments (i.e., stagnant, flowing blood, and pulsatile flow). We also demonstrate the ultrasound Doppler-guided swarm formation and navigation in the porcine coronary artery ex vivo. Our strategy presents a promising connection between swarm control and real-time imaging of microrobotic swarms for localized delivery in dynamic environments.
Copyright © 2021 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works. Distributed under a Creative Commons Attribution NonCommercial License 4.0 (CC BY-NC).
Figures
Similar articles
-
Tracking and navigation of a microswarm under laser speckle contrast imaging for targeted delivery.Sci Robot. 2024 Feb 21;9(87):eadh1978. doi: 10.1126/scirobotics.adh1978. Epub 2024 Feb 21. Sci Robot. 2024. PMID: 38381838
-
Real-Time Ultrasound Doppler Tracking and Autonomous Navigation of a Miniature Helical Robot for Accelerating Thrombolysis in Dynamic Blood Flow.ACS Nano. 2022 Jan 25;16(1):604-616. doi: 10.1021/acsnano.1c07830. Epub 2022 Jan 4. ACS Nano. 2022. PMID: 34985859
-
Real-Time Magnetic Navigation of a Rotating Colloidal Microswarm Under Ultrasound Guidance.IEEE Trans Biomed Eng. 2020 Dec;67(12):3403-3412. doi: 10.1109/TBME.2020.2987045. Epub 2020 Nov 19. IEEE Trans Biomed Eng. 2020. PMID: 32305888
-
External Power-Driven Microrobotic Swarm: From Fundamental Understanding to Imaging-Guided Delivery.ACS Nano. 2021 Jan 26;15(1):149-174. doi: 10.1021/acsnano.0c07753. Epub 2021 Jan 8. ACS Nano. 2021. PMID: 33417764 Review.
-
Active Micro/Nanoparticles in Colloidal Microswarms.Nanomaterials (Basel). 2023 May 21;13(10):1687. doi: 10.3390/nano13101687. Nanomaterials (Basel). 2023. PMID: 37242103 Free PMC article. Review.
Cited by
-
Multistimuli-responsive microrobots: A comprehensive review.Front Robot AI. 2022 Nov 7;9:1027415. doi: 10.3389/frobt.2022.1027415. eCollection 2022. Front Robot AI. 2022. PMID: 36420129 Free PMC article. Review.
-
Medical micro- and nanomotors in the body.Acta Pharm Sin B. 2023 Feb;13(2):517-541. doi: 10.1016/j.apsb.2022.10.010. Epub 2022 Oct 13. Acta Pharm Sin B. 2023. PMID: 36873176 Free PMC article. Review.
-
Milli-scale cellular robots that can reconfigure morphologies and behaviors simultaneously.Nat Commun. 2022 Jul 18;13(1):4156. doi: 10.1038/s41467-022-31913-0. Nat Commun. 2022. PMID: 35851279 Free PMC article.
-
Review on Recent Progress in Magnetic Nanoparticles: Synthesis, Characterization, and Diverse Applications.Front Chem. 2021 Jul 13;9:629054. doi: 10.3389/fchem.2021.629054. eCollection 2021. Front Chem. 2021. PMID: 34327190 Free PMC article. Review.
-
Vector-Controlled Wheel-Like Magnetic Swarms With Multimodal Locomotion and Reconfigurable Capabilities.Front Bioeng Biotechnol. 2022 Apr 25;10:877964. doi: 10.3389/fbioe.2022.877964. eCollection 2022. Front Bioeng Biotechnol. 2022. PMID: 35547169 Free PMC article.
References
-
- Nelson B. J., Kaliakatsos I. K., Abbott J. J., Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng. 12, 55–85 (2010). - PubMed
-
- M. Sitti, Mobile Microrobotics (MIT Press, 2017).
-
- Ceylan H., Yasa I. C., Kilic U., Hu W., Sitti M., Translational prospects of untethered medical microrobots. Prog. Biomed. Eng. 1, 012002 (2019).
-
- Schwarz L., Medina-Sánchez M., Schmidt O. G., Hybrid BioMicromotors. Appl. Phys. Rev. 4, 031301 (2017).
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
