

The collaborative mind: intention reading and trust in human-robot interaction
- PMID: 33659886
- PMCID: PMC7890414
- DOI: 10.1016/j.isci.2021.102130
The collaborative mind: intention reading and trust in human-robot interaction
Abstract
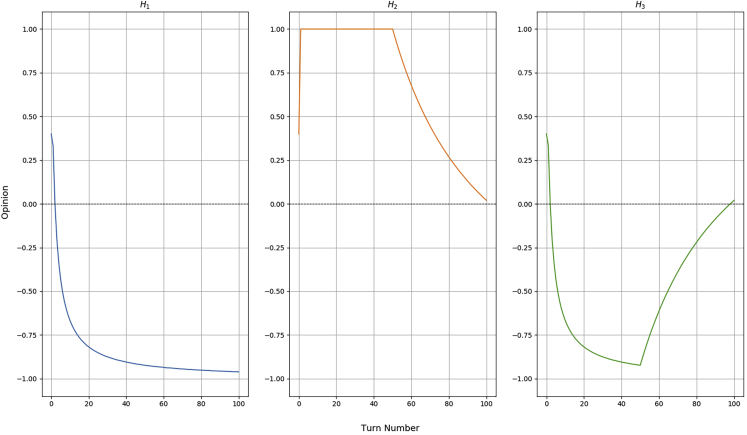
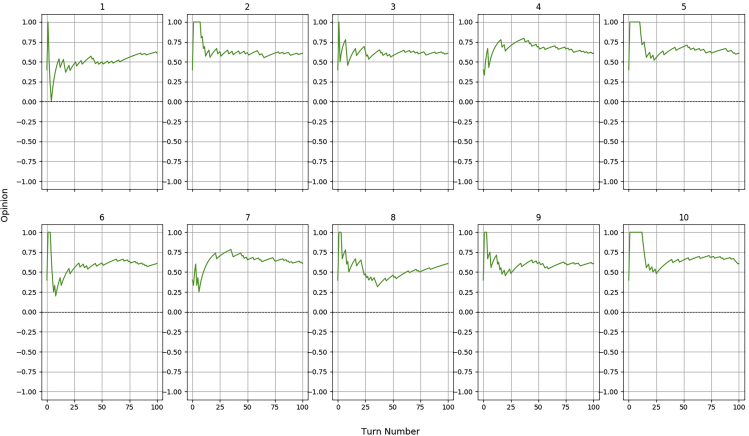
Robots are likely to become important social actors in our future and so require more human-like ways of assisting us. We state that collaboration between humans and robots is fostered by two cognitive skills: intention reading and trust. An agent possessing these abilities would be able to infer the non-verbal intentions of others and to evaluate how likely they are to achieve their goals, jointly understanding what kind and which degree of collaboration they require. For this reason, we propose a developmental artificial cognitive architecture that integrates unsupervised machine learning and probabilistic models to imbue a humanoid robot with intention reading and trusting capabilities. Our experimental results show that the synergistic implementation of these cognitive skills enable the robot to cooperate in a meaningful way, with the intention reading model allowing a correct goal prediction and with the trust component enhancing the likelihood of a positive outcome for the task.
Keywords: Artificial Intelligence; Human-Centered Computing; Human-Computer Interaction.
© 2021 The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures








References
-
- Baldwin D.A., Baird J.A. Discerning intentions in dynamic human action. Trends Cogn. Sci. 2001;5:171–178. - PubMed
-
- Bauer A., Wollherr D., Buss M. Human–robot collaboration: a survey. Int. J. HR. 2008;5:47–66.
-
- Butterfield J., Jenkins O.C., Sobel D.M., Schwertfeger J. Modeling aspects of theory of mind with markov random fields. Int. J. Soc. Robot. 2009;1:41–51.
-
- Das T., Teng B.-S. The risk-based view of trust: a conceptual framework. J. Bus. Psychol. 2004;19:85–116.
-
- De Castro E.C., Gudwin R.R. An episodic memory for a simulated autonomous robot. Proc. Robocontrol. 2010;2010:1–7.
LinkOut - more resources
Full Text Sources
Other Literature Sources
