

Nonlinear Ride Height Control of Active Air Suspension System with Output Constraints and Time-Varying Disturbances
- PMID: 33672184
- PMCID: PMC7926780
- DOI: 10.3390/s21041539
Nonlinear Ride Height Control of Active Air Suspension System with Output Constraints and Time-Varying Disturbances
Abstract
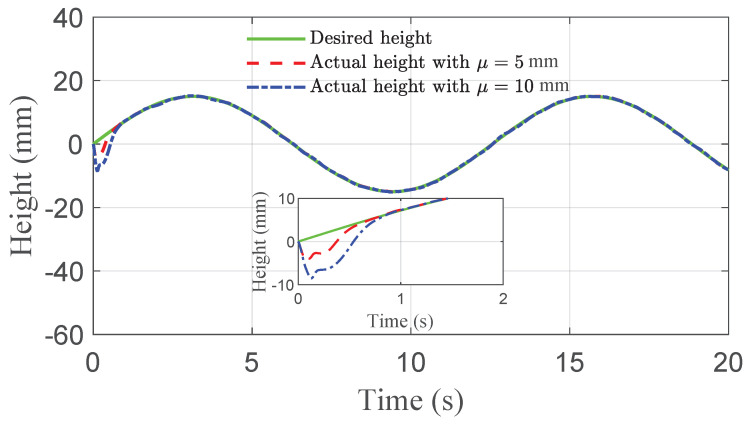
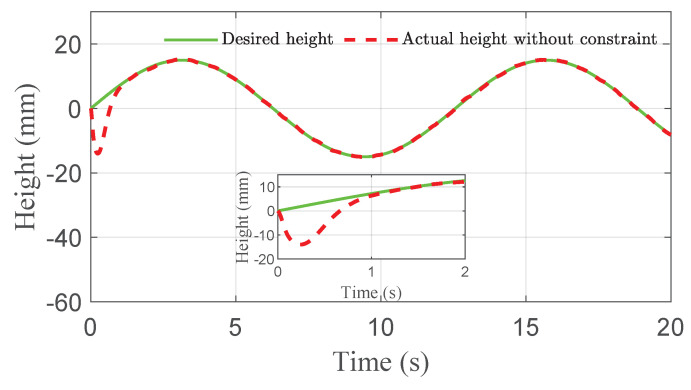
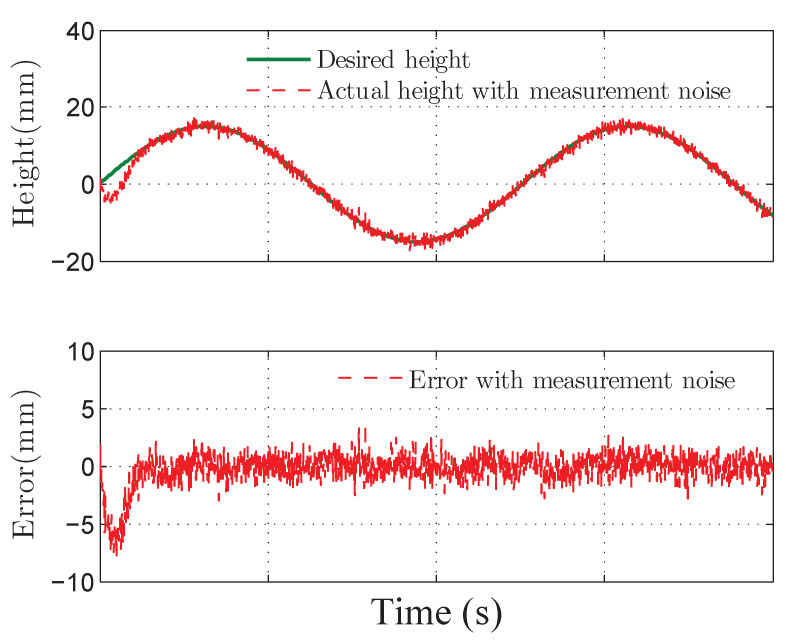
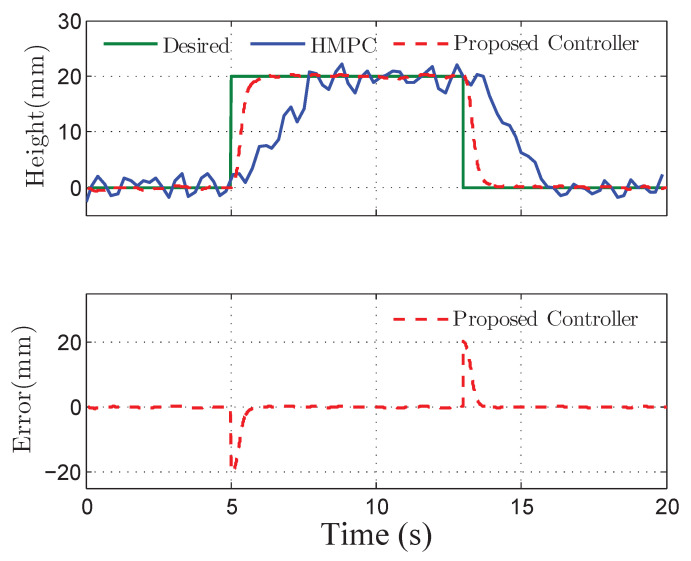
This paper addresses the problem of nonlinear height tracking control of an automobile active air suspension with the output state constraints and time-varying disturbances. The proposed control strategy guarantees that the ride height stays within a predefined range, and converges closely to an arbitrarily small neighborhood of the desired height, ensuring uniform ultimate boundedness. The designed nonlinear observer is able to compensate for the time-varying disturbances caused by external random road excitation and perturbations, achieving robust performance. Simulation results obtained from the co-simulation (AMESim-Matlab/Simulink) are given and analyzed, demonstrating the efficiency of the proposed control methodology.
Keywords: active air suspension; disturbance observer design; nonlinear height control; output constraints; random road excitation.
Conflict of interest statement
The authors declare no conflict of interest.
Figures







References
-
- Cao D., Song X., Ahmadian M. Editors’ perspectives: Road vehicle suspension design, dynamics, and control. Veh. Syst. Dyn. 2011;49:3–28. doi: 10.1080/00423114.2010.532223. - DOI
-
- Zhao J., Wong P.K., Ma X.B., Xie Z.C. Chassis integrated control for active suspension, active front steering and direct yaw moment systems using hierarchical strategy. Veh. Syst. Dyn. 2017;55:72–103. doi: 10.1080/00423114.2016.1245424. - DOI
-
- Aly A.A., Salem F.A. Vehicle suspension systems control: A review. Int. J. Control Autom. Syst. 2013;2:46–54.
Publication types
Grants and funding
- KY [2021] 297/Cooperation Project of Guizhou Education Department
- 51965008/National Science Foundation
- ZNWLQC[2019]3012/Key Science Project of Guizhou
- [2016] 4006/Special Fund of Chinese Central Government Guidance for Local Science and Technology Development
- GZNUD [2019] 22/Ph.D. Research Project of Guizhou Normal University
LinkOut - more resources
Full Text Sources
Other Literature Sources
