

Data-Driven Shape Sensing of a Surgical Continuum Manipulator Using an Uncalibrated Fiber Bragg Grating Sensor
- PMID: 33746624
- PMCID: PMC7978403
- DOI: 10.1109/jsen.2020.3028208
Data-Driven Shape Sensing of a Surgical Continuum Manipulator Using an Uncalibrated Fiber Bragg Grating Sensor
Abstract
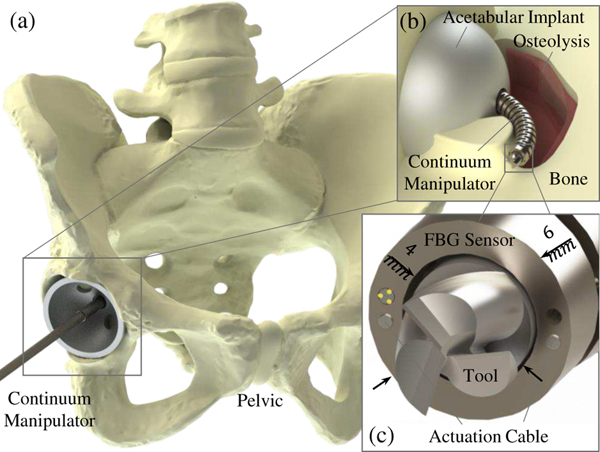
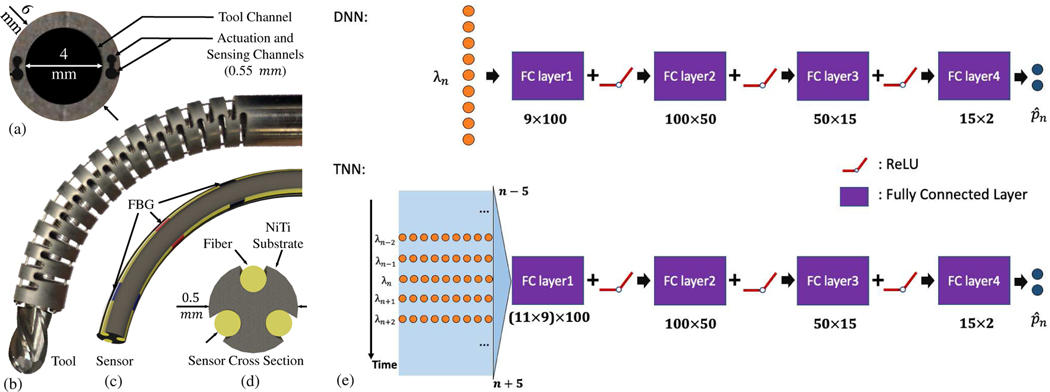
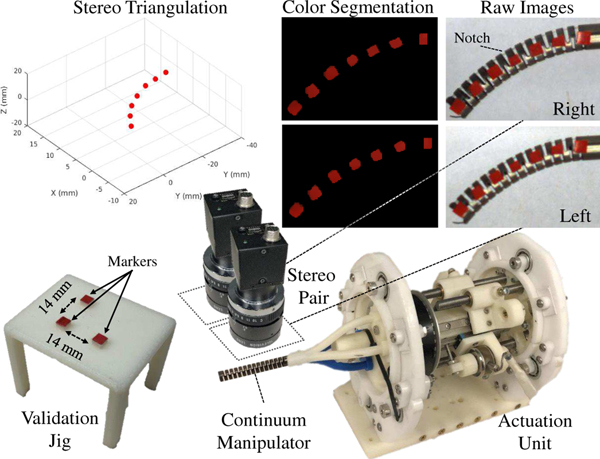
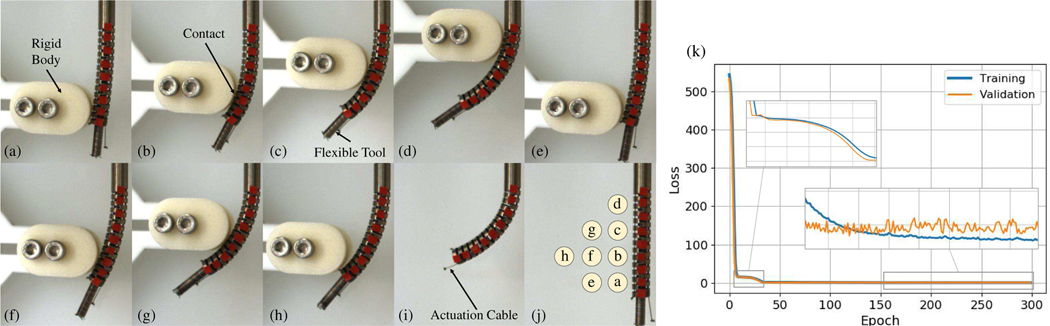
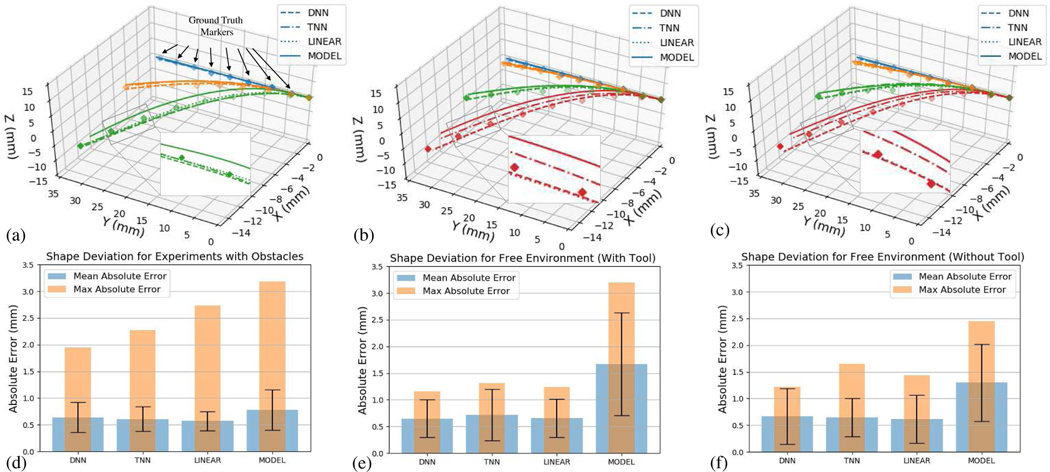
This article proposes a data-driven learning-based approach for shape sensing and Distal-end Position Estimation (DPE) of a surgical Continuum Manipulator (CM) in constrained environments using Fiber Bragg Grating (FBG) sensors. The proposed approach uses only the sensory data from an unmodeled uncalibrated sensor embedded in the CM to estimate the shape and DPE. It serves as an alternate to the conventional mechanics-based sensor-model-dependent approach which relies on several sensor and CM geometrical assumptions. Unlike the conventional approach where the shape is reconstructed from proximal to distal end of the device, we propose a reversed approach where the distal-end position is estimated first and given this information, shape is then reconstructed from distal to proximal end. The proposed methodology yields more accurate DPE by avoiding accumulation of integration errors in conventional approaches. We study three data-driven models, namely a linear regression model, a Deep Neural Network (DNN), and a Temporal Neural Network (TNN) and compare DPE and shape reconstruction results. Additionally, we test both approaches (data-driven and model-dependent) against internal and external disturbances to the CM and its environment such as incorporation of flexible medical instruments into the CM and contacts with obstacles in taskspace. Using the data-driven (DNN) and model-dependent approaches, the following max absolute errors are observed for DPE: 0.78 mm and 2.45 mm in free bending motion, 0.11 mm and 3.20 mm with flexible instruments, and 1.22 mm and 3.19 mm with taskspace obstacles, indicating superior performance of the proposed data-driven approach compared to the conventional approaches.
Keywords: Continuum Manipulator; Data-driven Sensing; Deep Neural Networks; Fiber Bragg Grating; Shape Sensing; Temporal Neural Networks.
Figures
References
-
- Vyas L, Aquino D, Kuo C-H, Dai JS, and Dasgupta P, “Flexible robotics,” BJU international, vol. 107, no. 2, pp. 187–189, 2011. - PubMed
-
- Burgner-Kahrs J, Rucker DC, and Choset H, “Continuum robots for medical applications: A survey,” IEEE Transactions on Robotics, vol. 31, no. 6, pp. 1261–1280, 2015.
-
- Roesthuis RJ, Kemp M, van den Dobbelsteen JJ, and Misra S, “Three-dimensional needle shape reconstruction using an array of fiber bragg grating sensors,” IEEE/ASME transactions on mechatronics, vol. 19, no. 4, pp. 1115–1126, 2013.
-
- Khan F, Denasi A, Barrera D, Madrigal J, Sales S, and Misra S, “Multi-core optical fibers with bragg gratings as shape sensor for flexible medical instruments,” IEEE sensors journal, 2019.
-
- Shi C, Luo X, Qi P, Li T, Song S, Najdovski Z, Fukuda T, and Ren H, “Shape sensing techniques for continuum robots in minimally invasive surgery: A survey,” IEEE Transactions on Biomedical Engineering, vol. 64, no. 8, pp. 1665–1678, 2016. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources