Enabling high-throughput biology with flexible open-source automation
- PMID: 33764680
- PMCID: PMC7993322
- DOI: 10.15252/msb.20209942
Enabling high-throughput biology with flexible open-source automation
Abstract
Our understanding of complex living systems is limited by our capacity to perform experiments in high throughput. While robotic systems have automated many traditional hand-pipetting protocols, software limitations have precluded more advanced maneuvers required to manipulate, maintain, and monitor hundreds of experiments in parallel. Here, we present Pyhamilton, an open-source Python platform that can execute complex pipetting patterns required for custom high-throughput experiments such as the simulation of metapopulation dynamics. With an integrated plate reader, we maintain nearly 500 remotely monitored bacterial cultures in log-phase growth for days without user intervention by taking regular density measurements to adjust the robotic method in real-time. Using these capabilities, we systematically optimize bioreactor protein production by monitoring the fluorescent protein expression and growth rates of a hundred different continuous culture conditions in triplicate to comprehensively sample the carbon, nitrogen, and phosphorus fitness landscape. Our results demonstrate that flexible software can empower existing hardware to enable new types and scales of experiments, empowering areas from biomanufacturing to fundamental biology.
Keywords: bioautomation; high-throughput biology; liquid-handling; robotics; systems biology.
© 2021 The Authors. Published under the terms of the CC BY 4.0 license.
Conflict of interest statement
The authors declare that they have no conflict of interest.
Figures
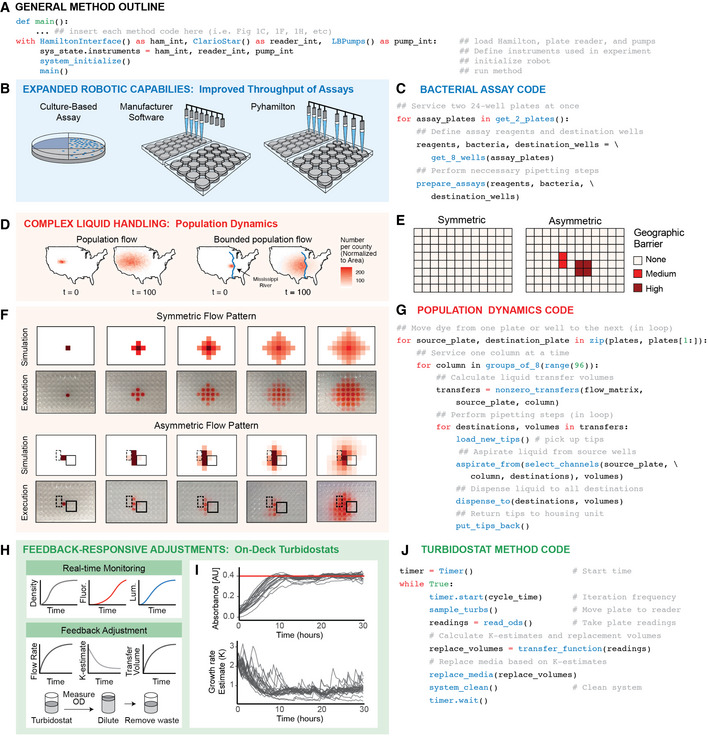
Generalizable Python outline for writing custom Pyhamilton code to interface with robot and integrated equipment such as plate readers (e.g., ClarioStar) and custom pump arrays.
Expanded robot capabilities allow for improved throughput of laboratory assays across 24‐well plates.
Example code required to run a bacterial assay across multiple simultaneous plates. Code for bacteriophage plaque assay is shown (see supplemental methods).
Implementing complex and arbitrary bi‐directional liquid handling to simulate experiments such as unbounded (left) or bounded (right) population flow across a geographic region, such as a river.
Geographic “barriers” described in matrix format
Simulation of bounded and unbounded migration (top), and visualization of the liquid patterns executed by the robot each iteration (bottom). Solid blue box designates “high” geographic barrier, dashed blue box designates a “medium” geographic barrier.
Example code required to run population dynamics simulations, using a sparse matrix to assign source wells, destination wells, and volume transfer fractions.
Real‐time monitoring of on‐deck turbidostats enables feedback control to equilibrate cultures to a set density.
Plate reader measurements for OD (top), and respective estimated growth estimates (bottom) obtained from data from 24 replicates. Data are smoothed with rolling mean and outlier points are excluded. OD set‐point shown in red.
Example code required to maintain on‐deck turbidostats using a transfer function to calculate k‐estimates and volume transfer rates.
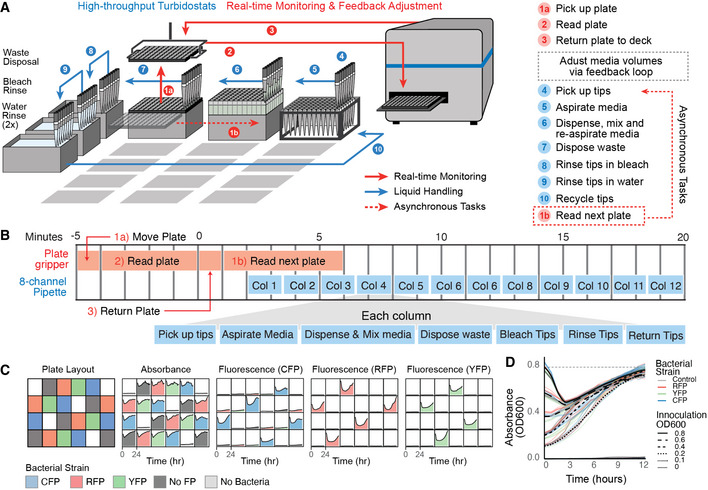
High‐throughput turbidostat summary for up to 480 simultaneous turbidostats. Bacterial populations are housed in 96‐well clear‐bottom plates on the deck of a liquid‐handling robot. Liquid handling is used to create a turbidostat in every well, continuously refreshing each population by diluting the bacterial culture from a respective deep‐well media reservoir on deck. An integrated plate reader is used to monitor absorbance, luminescence, or fluorescence readouts for each culture. Movements by robotic pipette (blue arrow) and plate reader (red arrow) are shown. Dotted lines indicate tasks that are executed asynchronously, and require 10 min per plate.
Step‐by‐step summary of high‐throughput turbidostat method, executed asynchronously.
Plate layout of real‐time absorbance, CFP, RFP, and YFP fluorescence readings of 96 simultaneous cultures inoculated with either no bacteria, FP‐null bacteria, and CFP, RFP, or YFP‐expressing bacteria. Data shown from 24 representative wells.
Real‐time absorbance measurements of 96 E. coli BL21 cultures inoculated at ODs of 0, 0.1, 0.2 0.4, 0.6, 0.8, which equilibrate to a set point of 0.8 within 12 h, consistent with simulation (Appendix Fig S3).
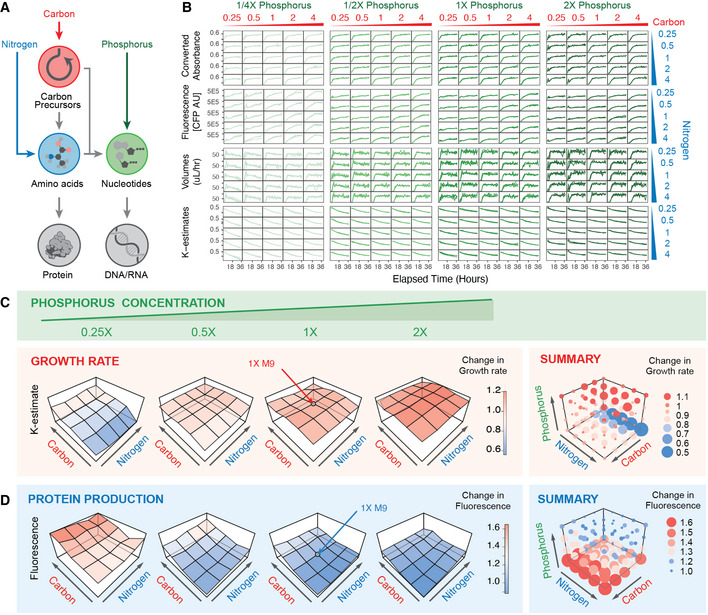
Schematic flow of carbon, nitrogen and phosphorus nutrients in protein and nucleotide production.
Real‐time absorbance and fluorescent reporter monitoring for BL21 E. coli expressing CFP in 100 various M9 media compositions (n = 3 per condition). Real‐time calculations of volumes/h and estimates for k‐value convergence shown.
(left) Average growth rate for each media composition plotted as a 2‐dimensional fitness landscape of carbon and nitrogen, for four concentrations of phosphorus. (right) Summary of all 100 conditions shown as 3D fitness landscape colored by growth rate (blue = low, red = high). Size of dot indicates absolute deviation from average 1X M9 media composition.
(left) Average amount of protein expression (measured by fluorescence) of each media composition plotted as a 2‐dimensional fitness landscape of carbon and nitrogen, for four concentrations of phosphorus (right). 3D protein production landscape of all 100 conditions colored by amount of fluorescence (blue = low, red = high). Size of dot indicates absolute deviation from average 1× M9 media composition.
References
-
- Appleton E, Densmore D, Madsen C, Roehner N (2017) Needs and opportunities in bio‐design automation: four areas for focus. Curr Opin Chem Biol 40: 111–118 - PubMed
-
- Bär H, Hochstrasser R, Papenfub B (2012) SiLA: basic standards for rapid integration in laboratory automation. J Lab Autom 17: 86–95 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources