

The role of kinematic properties in multiple object tracking
- PMID: 33769442
- PMCID: PMC7998010
- DOI: 10.1167/jov.21.3.22
The role of kinematic properties in multiple object tracking
Abstract
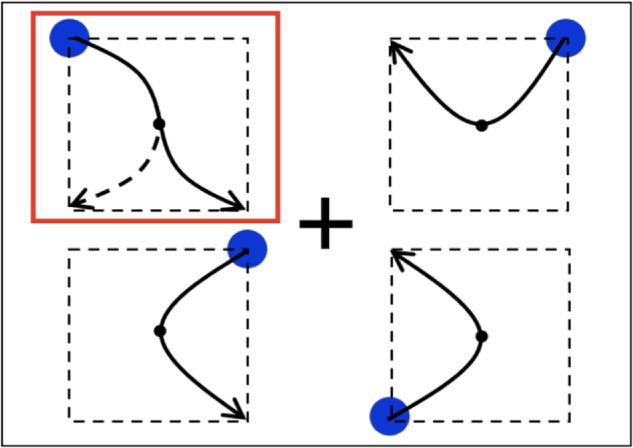
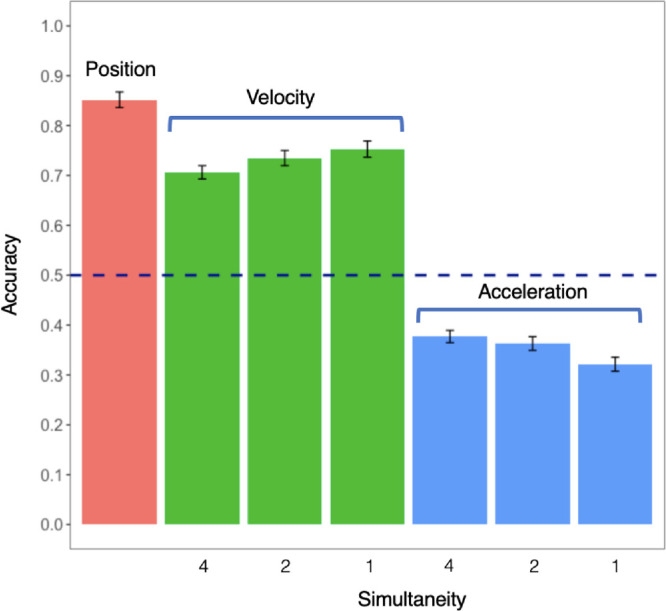
People commonly track objects moving in complex natural displays and their performance in the multiple object tracking paradigm has been used to study such visual attention for more than three decades. Given the theoretical and practical importance of object tracking, it is critical to understand how people solve the correspondence problem to track objects; however, it remains unclear what information people use to achieve this feat. In particular, although people can track multiple moving objects based on their positions, there is ambiguity about whether people can track objects via higher order kinematic information, such as velocity. We designed a paradigm in which position was rendered uninformative to directly examine whether people could use higher order kinematic information to track multiple objects. We find that people can track via velocity, but not acceleration, even though observers can reliably detect the acceleration cue that they cannot use for tracking. Furthermore, we show a capacity constraint on using higher order kinematic information-people perform worse when required to use velocity to resolve correspondence for multiple object pairs simultaneously. Together, our results suggest that, although people can use higher order kinematic information for object tracking, precise higher order kinematic information is not freely available from the early visual system.
Figures











References
-
- Alvarez, G. A., & Franconeri, S. L. (2007). How many objects can you track? Evidence for a resource-limited attentive tracking mechanism. Journal of Vision, 7(13), 14, 1–10. - PubMed
-
- Anstis, S., & Ramachandran, V. S. (1987). Visual inertia in apparent motion. Vision Research, 27(5), 755–764. - PubMed
-
- Blaser, E., Pylyshyn, Z. W., & Holcombe, A. O. (2000). Tracking an object through feature space. Nature, 408(6809), 196–199. - PubMed
-
- Bettencourt, K., & Somers, D. (2009). Effects of target enhancement and distractor suppression on multiple object tracking capacity. Journal of Vision, 9(7), 1–11. - PubMed
-
- Chen, W.-Y., Howe, P. D., & Holcombe, A. O. (2013). Resource demands of object tracking and differential allocation of the resource. Attention, Perception & Psychophysics, 75(4), 710–725. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
