

Variable Admittance Control Based on Human-Robot Collaboration Observer Using Frequency Analysis for Sensitive and Safe Interaction
- PMID: 33800522
- PMCID: PMC8078170
- DOI: 10.3390/s21051899
Variable Admittance Control Based on Human-Robot Collaboration Observer Using Frequency Analysis for Sensitive and Safe Interaction
Abstract
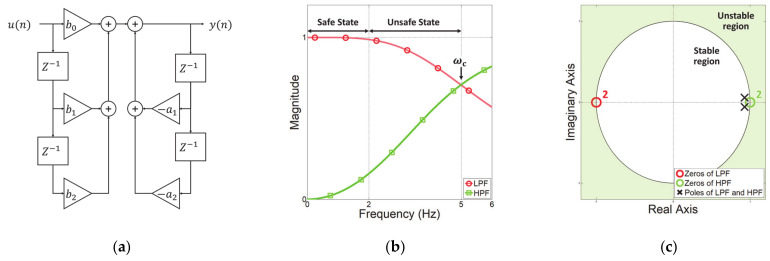
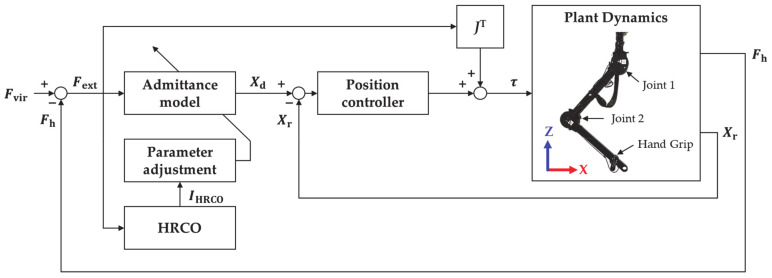
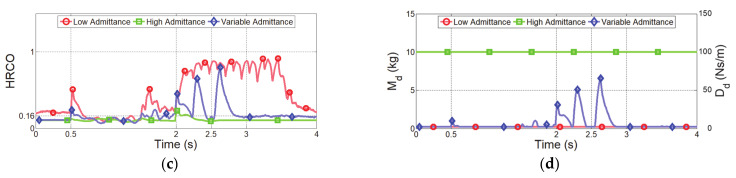
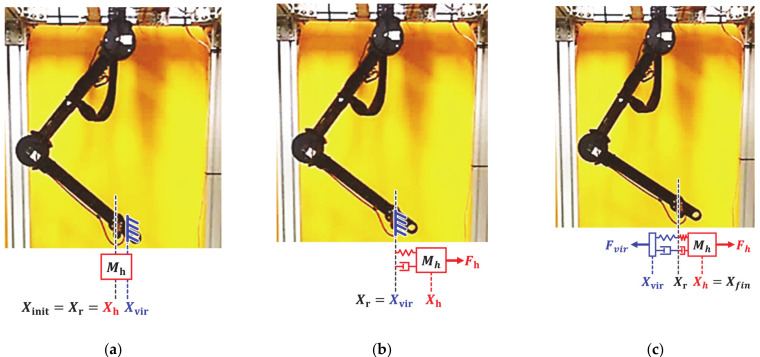
A collaborative robot should be sensitive to the user intention while maintaining safe interaction during tasks such as hand guiding. Observers based on the discrete Fourier transform have been studied to distinguish between the low-frequency motion elicited by the operator and high-frequency behavior resulting from system instability and disturbances. However, the discrete Fourier transform requires an excessively long sampling time. We propose a human-robot collaboration observer based on an infinite impulse response filter to increase the intention recognition speed. By using this observer, we also propose a variable admittance controller to ensure safe collaboration. The recognition speed of the human-robot collaboration observer is 0.29 s, being 3.5 times faster than frequency analysis based on the discrete Fourier transform. The performance of the variable admittance controller and its improved recognition speed are experimentally verified on a two-degrees-of-freedom manipulator. We confirm that the improved recognition speed of the proposed human-robot collaboration observer allows us to timely recover from unsafe to safe collaboration.
Keywords: admittance control; human–robot collaboration; physical human–robot interaction.
Conflict of interest statement
The authors declare no conflict of interest.
Figures











References
-
- International Federation of Robotics . Executive Summary World Robotics 2016 Industrial Robots. International Federation of Robotics; Frankfurt, Germany: 2016.
-
- Probst L., Frideres L., Pedersen B., Caputi C. Service Innovation for Smart Industry: Human–Robot Collaboration. European Commission; Luxembourg: 2015.
-
- Villani V., Pini F., Leali F., Secchi C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics. 2018;55:248–266. doi: 10.1016/j.mechatronics.2018.02.009. - DOI
-
- ISO . ISO 10218: Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 1: Robots. ISO; Geneve, Switzerland: 2011.
-
- ISO . ISO 10218-2: Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 2: Robot Systems and Integration. ISO; Geneve, Switzerland: 2011.
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
