

A Cost-Effective Inertial Measurement System for Tracking Movement and Triggering Kinesthetic Feedback in Lower-Limb Prosthesis Users
- PMID: 33800790
- PMCID: PMC7961441
- DOI: 10.3390/s21051844
A Cost-Effective Inertial Measurement System for Tracking Movement and Triggering Kinesthetic Feedback in Lower-Limb Prosthesis Users
Abstract
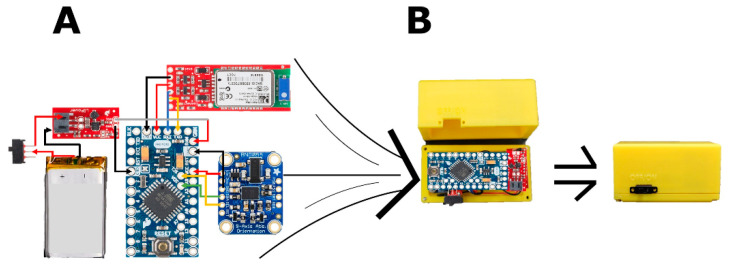
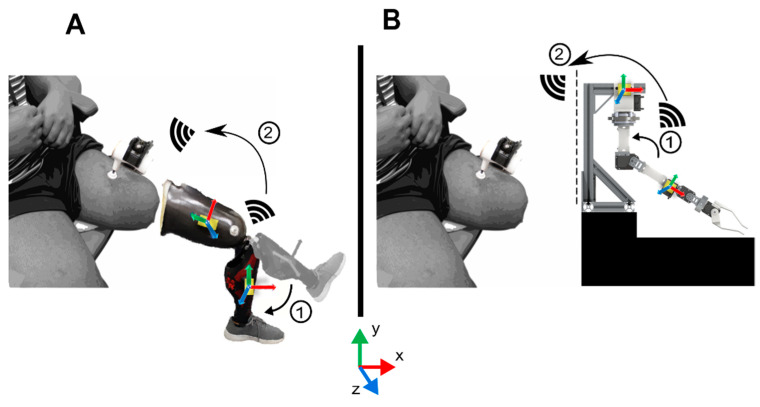
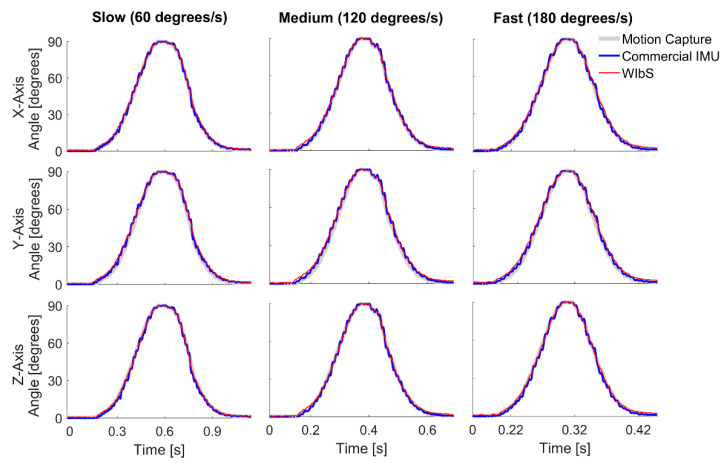
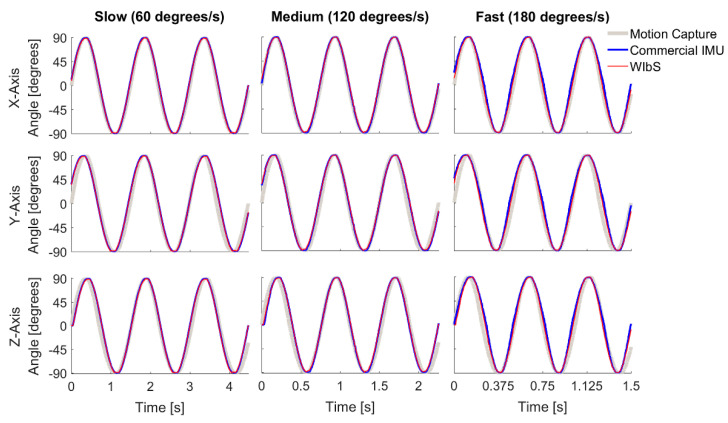
Advances in lower-limb prosthetic technologies have facilitated the restoration of ambulation; however, users of such technologies still experience reduced balance control, also due to the absence of proprioceptive feedback. Recent efforts have demonstrated the ability to restore kinesthetic feedback in upper-limb prosthesis applications; however, technical solutions to trigger the required muscle vibration and provide automated feedback have not been explored for lower-limb prostheses. The study's first objective was therefore to develop a feedback system capable of tracking lower-limb movement and automatically triggering a muscle vibrator to induce the kinesthetic illusion. The second objective was to investigate the developed system's ability to provide kinesthetic feedback in a case participant. A low-cost, wireless feedback system, incorporating two inertial measurement units to trigger a muscle vibrator, was developed and tested in an individual with limb loss above the knee. Our system had a maximum communication delay of 50 ms and showed good tracking of Gaussian and sinusoidal movement profiles for velocities below 180 degrees per second (error < 8 degrees), mimicking stepping and walking, respectively. We demonstrated in the case participant that the developed feedback system can successfully elicit the kinesthetic illusion. Our work contributes to the integration of sensory feedback in lower-limb prostheses, to increase their use and functionality.
Keywords: device development; kinematic feedback; kinesthetic feedback; kinesthetic illusion; lower-limb prostheses; sensory feedback; wearable sensor.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Figures
References
-
- Fite K.B. Overview of the components used in active and passive lower-limb prosthetic devices. In: Tepe V., Peterson C.M., editors. Full Stride: Advancing the State of the Art in Lower Extremity Gait Systems. Springer; New York City, NY, USA: 2017. pp. 55–74.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
