

Tactile Sensors for Parallel Grippers: Design and Characterization
- PMID: 33803486
- PMCID: PMC7967162
- DOI: 10.3390/s21051915
Tactile Sensors for Parallel Grippers: Design and Characterization
Abstract
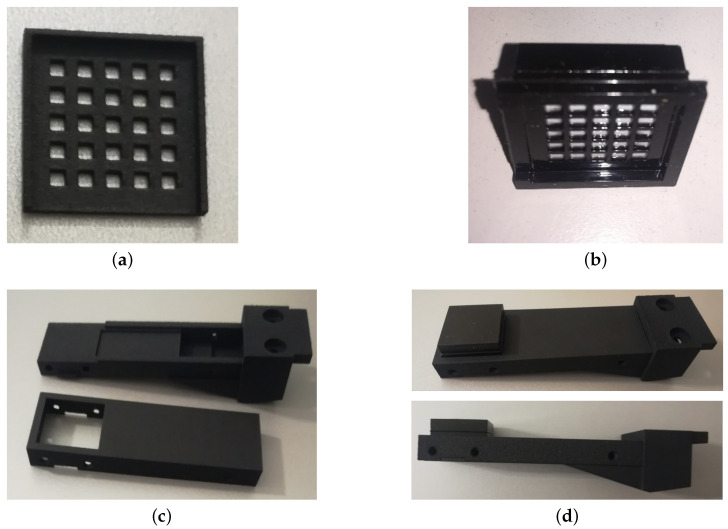
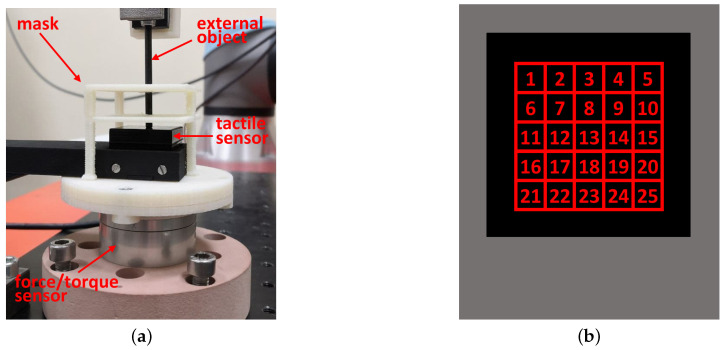
Tactile data perception is of paramount importance in today's robotics applications. This paper describes the latest design of the tactile sensor developed in our laboratory. Both the hardware and firmware concepts are reported in detail in order to allow the research community the sensor reproduction, also according to their needs. The sensor is based on optoelectronic technology and the pad shape can be adapted to various robotics applications. A flat surface, as the one proposed in this paper, can be well exploited if the object sizes are smaller than the pad and/or the shape recognition is needed, while a domed pad can be used to manipulate bigger objects. Compared to the previous version, the novel tactile sensor has a larger sensing area and a more robust electronic, mechanical and software design that yields less noise and higher flexibility. The proposed design exploits standard PCB manufacturing processes and advanced but now commercial 3D printing processes for the realization of all components. A GitHub repository has been prepared with all files needed to allow the reproduction of the sensor for the interested reader. The whole sensor has been tested with a maximum load equal to 15N, by showing a sensitivity equal to 0.018V/N. Moreover, a complete and detailed characterization for the single taxel and the whole pad is reported to show the potentialities of the sensor also in terms of response time, repeatability, hysteresis and signal to noise ratio.
Keywords: dexterous manipulation; sensor characterization; tactile sensing.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Figures

















References
-
- Suen M., Chen R. Capacitive Tactile Sensor with Concentric-Shape Electrodes for Three-Axial Force Measurement. Proceedings. 2018;2:708. doi: 10.3390/proceedings2130708. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
