

A Review of Robotic and OCT-Aided Systems for Vitreoretinal Surgery
- PMID: 33813718
- PMCID: PMC8107166
- DOI: 10.1007/s12325-021-01692-z
A Review of Robotic and OCT-Aided Systems for Vitreoretinal Surgery
Abstract
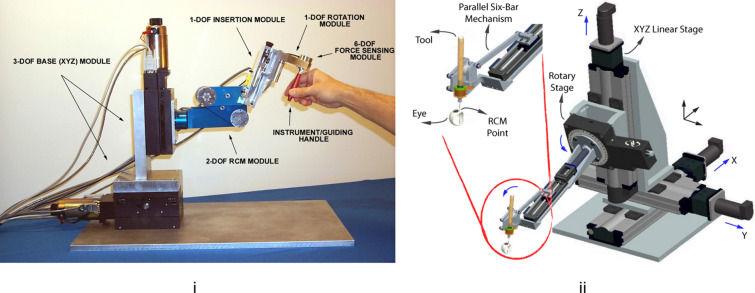
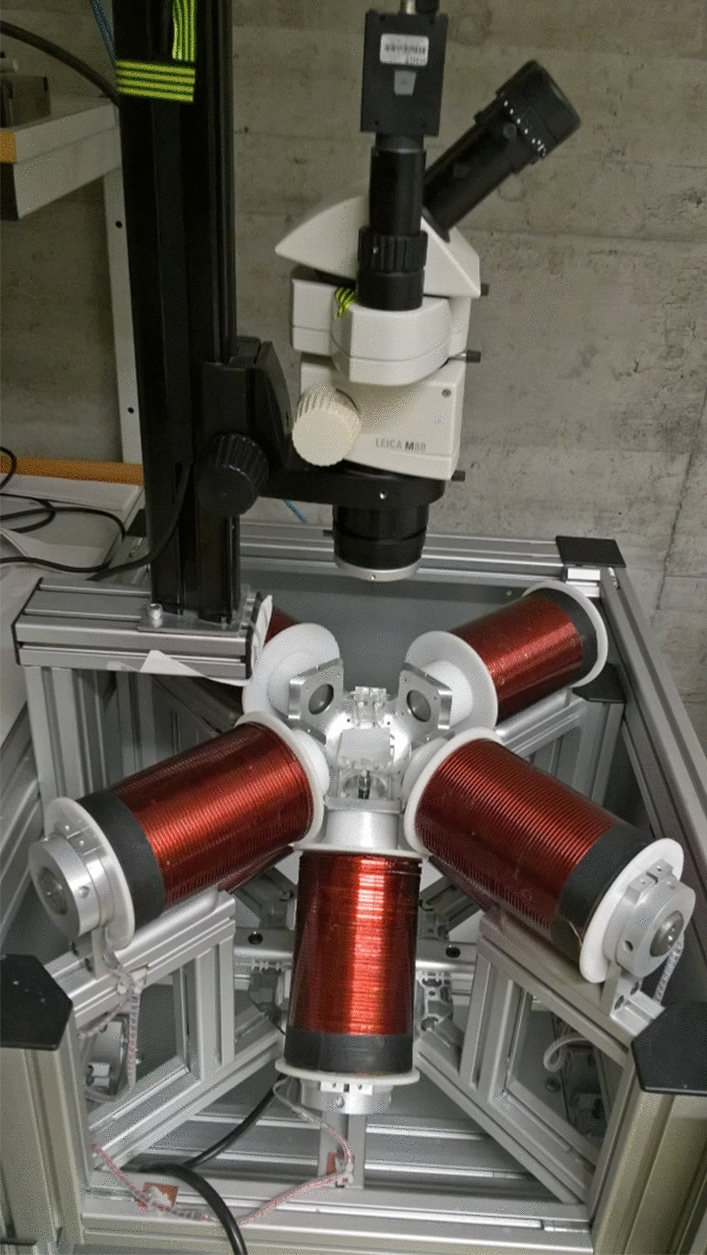
The introduction of the intraocular vitrectomy instrument by Machemer et al. has led to remarkable advancements in vitreoretinal surgery enabling the limitations of human physiologic capabilities to be reached. To overcome the barriers of perception, tremor, and dexterity, robotic technologies have been investigated with current advancements nearing the feasibility for clinical use. There are four categories of robotic systems that have emerged through the research: (1) handheld instruments with intrinsic robotic assistance, (2) hand-on-hand robotic systems, (3) teleoperated robotic systems, and (4) magnetic guidance robots. This review covers the improvements and the remaining needs for safe, cost-effective clinical deployment of robotic systems in vitreoretinal surgery.
Keywords: Image-guided surgery; Medical robotics; Micromanipulator; Ophthalmic surgery; Ophthalmology; Optical coherence tomography; Telemanipulation; Vitreoretinal surgery.
Figures

References
-
- Machemer R. Vitrectomy, a pars plana approach. Trans Am Acad Ophthalmol. 1971;75:813–820. - PubMed
-
- Jagtap AD, Riviere CN. Applied force during vitreoretinal microsurgery with handheld instruments. In: The 26th annual international conference of the IEEE engineering in medicine and biology society, vol. 1. IEEE; 2004. pp. 2771–2773. - PubMed
-
- Jensen P, Gupta P, De Juan E. Quantification of microsurgical tactile perception. In: Proceedings of the first joint BMES/EMBS conference. 1999 IEEE engineering in medicine and biology 21st annual conference and the 1999 annual fall meeting of the biomedical engineering society, vol. 2. IEEE; 1999. p. 839.
-
- Wilkins JR, Puliafito CA, Hee MR, et al. Characterization of epiretinal membranes using optical coherence tomography. Ophthalmology. 1996;103(12):2142–2151. - PubMed
-
- Riviere CN, Rader RS, Khosla PK. Characteristics of hand motion of eye surgeons. In: Proceedings of the 19th annual international conference of the IEEE engineering in medicine and biology society ‘Magnificent Milestones and Emerging Opportunities in Medical Engineering’ (Cat. No. 97CH36136), vol. 4. IEEE; 1997. pp. 1690–1693.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
