

Whirligig beetles as corralled active Brownian particles
- PMID: 33849331
- PMCID: PMC8086927
- DOI: 10.1098/rsif.2021.0114
Whirligig beetles as corralled active Brownian particles
Abstract
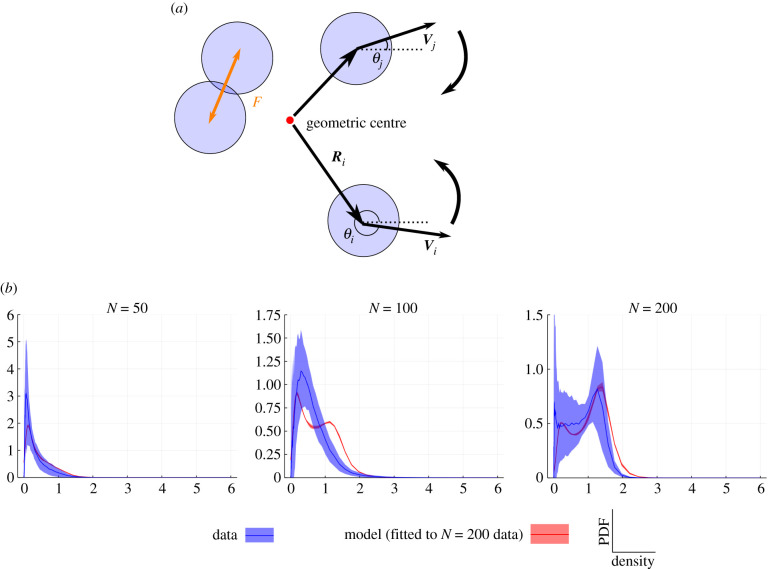
We study the collective dynamics of groups of whirligig beetles Dineutus discolor (Coleoptera: Gyrinidae) swimming freely on the surface of water. We extract individual trajectories for each beetle, including positions and orientations, and use this to discover (i) a density-dependent speed scaling like v ∼ ρ-ν with ν ≈ 0.4 over two orders of magnitude in density (ii) an inertial delay for velocity alignment of approximately 13 ms and (iii) coexisting high and low-density phases, consistent with motility-induced phase separation (MIPS). We modify a standard active Brownian particle (ABP) model to a corralled ABP (CABP) model that functions in open space by incorporating a density-dependent reorientation of the beetles, towards the cluster. We use our new model to test our hypothesis that an motility-induced phase separation (MIPS) (or a MIPS like effect) can explain the co-occurrence of high- and low-density phases we see in our data. The fitted model then successfully recovers a MIPS-like condensed phase for N = 200 and the absence of such a phase for smaller group sizes N = 50, 100.
Keywords: active Brownian particles; collective motion; inertial delay; insect behaviour; motility-induced phase separation.
Figures


References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials