

Variation in personality can substitute for social feedback in coordinated animal movements
- PMID: 33850250
- PMCID: PMC8044162
- DOI: 10.1038/s42003-021-01991-9
Variation in personality can substitute for social feedback in coordinated animal movements
Abstract
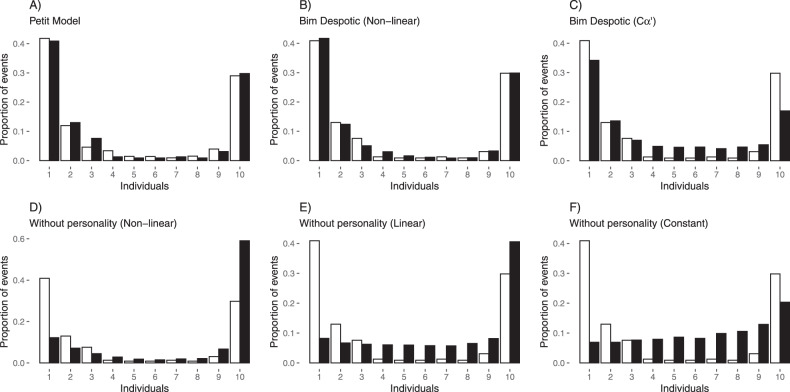
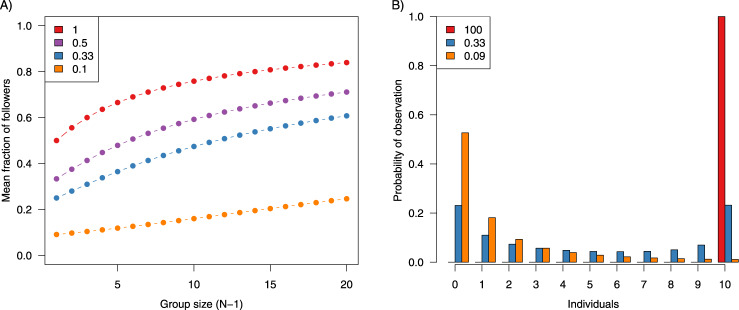
Collective movements are essential for the effective function of animal societies, but are complicated by the need for consensus among group members. Consensus is typically assumed to arise via feedback mechanisms, but this ignores inter-individual variation in behavioural tendency ('personality'), which is known to underpin the successful function of many complex societies. In this study, we use a theoretical approach to examine the relative importance of personality and feedback in the emergence of collective movement decisions in animal groups. Our results show that variation in personality dramatically influences collective decisions and can partially or completely replace feedback depending on the directionality of relationships among individuals. The influence of personality increases with the exaggeration of differences among individuals. While it is likely that both feedback and personality interact in nature, our findings highlight the potential importance of personality in driving collective processes.
Conflict of interest statement
The authors declare no competing interests.
Figures


Similar articles
-
Sociability as a personality trait in animals: methods, causes and consequences.Biol Rev Camb Philos Soc. 2022 Apr;97(2):802-816. doi: 10.1111/brv.12823. Epub 2021 Dec 10. Biol Rev Camb Philos Soc. 2022. PMID: 34894041 Review.
-
Consistent Individual Differences Drive Collective Behavior and Group Functioning of Schooling Fish.Curr Biol. 2017 Sep 25;27(18):2862-2868.e7. doi: 10.1016/j.cub.2017.08.004. Epub 2017 Sep 7. Curr Biol. 2017. PMID: 28889975 Free PMC article.
-
Social interactions shape individual and collective personality in social spiders.Proc Biol Sci. 2018 Sep 5;285(1886):20181366. doi: 10.1098/rspb.2018.1366. Proc Biol Sci. 2018. PMID: 30185649 Free PMC article.
-
Behavioural plasticity across social contexts is regulated by the directionality of inter-individual differences.Behav Processes. 2017 Aug;141(Pt 2):196-204. doi: 10.1016/j.beproc.2016.10.004. Epub 2016 Oct 11. Behav Processes. 2017. PMID: 27737769
-
The importance of individual variation in the dynamics of animal collective movements.Philos Trans R Soc Lond B Biol Sci. 2018 May 19;373(1746):20170008. doi: 10.1098/rstb.2017.0008. Philos Trans R Soc Lond B Biol Sci. 2018. PMID: 29581393 Free PMC article. Review.
Cited by
-
Personality predicts collective behavior in greylag geese: Influencers are bold and followers are exploratory.iScience. 2025 Jul 22;28(8):113170. doi: 10.1016/j.isci.2025.113170. eCollection 2025 Aug 15. iScience. 2025. PMID: 40822343 Free PMC article.
-
Growth and physiological response of proactive and reactive juvenile "tambaqui" (Colossoma macropomum) in a recirculating aquaculture system.Trop Anim Health Prod. 2024 Jun 5;56(5):185. doi: 10.1007/s11250-024-04047-2. Trop Anim Health Prod. 2024. PMID: 38837066
-
Familiarity, age, weaning and health status impact social proximity networks in dairy calves.Sci Rep. 2023 Feb 8;13(1):2275. doi: 10.1038/s41598-023-29309-1. Sci Rep. 2023. PMID: 36754990 Free PMC article.
-
Mechanisms of collective learning: how can animal groups improve collective performance when repeating a task?Philos Trans R Soc Lond B Biol Sci. 2023 Apr 10;378(1874):20220060. doi: 10.1098/rstb.2022.0060. Epub 2023 Feb 20. Philos Trans R Soc Lond B Biol Sci. 2023. PMID: 36802785 Free PMC article. Review.
References
-
- Boinski, S. & Garber, P. A. On the Move: How and Why Animals Travel in Groups (University of Chicago Press, 2000).
-
- Bonabeau E, Theraulaz G, Deneubourg J-L, Aron S, Camazine S. Self-organization in social insects. TREE. 1997;12:188–193. - PubMed
-
- Camazine, S. et al. Self-Organization in Biological Systems (Princeton University Press, 2001).
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
