

Investigating Tissue Mechanics in vitro Using Untethered Soft Robotic Microdevices
- PMID: 33869296
- PMCID: PMC8044975
- DOI: 10.3389/frobt.2021.649765
Investigating Tissue Mechanics in vitro Using Untethered Soft Robotic Microdevices
Abstract
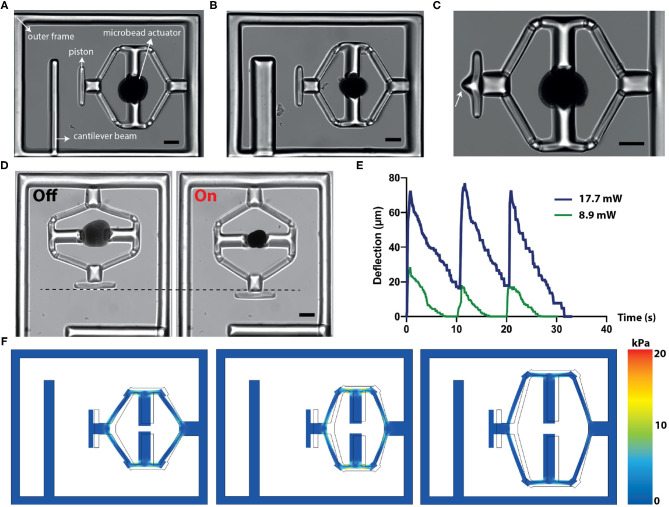
This paper presents the design, fabrication, and operation of a soft robotic compression device that is remotely powered by laser illumination. We combined the rapid and wireless response of hybrid nanomaterials with state-of-the-art microengineering techniques to develop machinery that can apply physiologically relevant mechanical loading. The passive hydrogel structures that constitute the compliant skeleton of the machines were fabricated using single-step in situ polymerization process and directly incorporated around the actuators without further assembly steps. Experimentally validated computational models guided the design of the compression mechanism. We incorporated a cantilever beam to the prototype for life-time monitoring of mechanical properties of cell clusters on optical microscopes. The mechanical and biochemical compatibility of the chosen materials with living cells together with the on-site manufacturing process enable seamless interfacing of soft robotic devices with biological specimen.
Keywords: 3D tissue constructs; hydrogels; mechanobiolgy; microfabrication; plasmonics; soft robotics.
Copyright © 2021 Parreira, Özelçi and Sakar.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures




Similar articles
-
Modular soft robotic microdevices for dexterous biomanipulation.Lab Chip. 2019 Feb 26;19(5):778-788. doi: 10.1039/c8lc01200h. Lab Chip. 2019. PMID: 30714604 Free PMC article.
-
3D Printing Hydrogel-Based Soft and Biohybrid Actuators: A Mini-Review on Fabrication Techniques, Applications, and Challenges.Front Robot AI. 2021 Apr 29;8:673533. doi: 10.3389/frobt.2021.673533. eCollection 2021. Front Robot AI. 2021. PMID: 33996931 Free PMC article. Review.
-
Addressable Acoustic Actuation of 3D Printed Soft Robotic Microsystems.Adv Sci (Weinh). 2020 Sep 21;7(20):2001120. doi: 10.1002/advs.202001120. eCollection 2020 Oct. Adv Sci (Weinh). 2020. PMID: 33101852 Free PMC article.
-
3D Printing Materials for Soft Robotics.Adv Mater. 2021 May;33(19):e2003387. doi: 10.1002/adma.202003387. Epub 2020 Nov 9. Adv Mater. 2021. PMID: 33164255 Review.
-
Light-driven bimorph soft actuators: design, fabrication, and properties.Mater Horiz. 2021 Mar 1;8(3):728-757. doi: 10.1039/d0mh01406k. Epub 2020 Dec 7. Mater Horiz. 2021. PMID: 34821314 Review.
Cited by
-
Actuated 3D microgels for single cell mechanobiology.Lab Chip. 2022 May 17;22(10):1962-1970. doi: 10.1039/d2lc00203e. Lab Chip. 2022. PMID: 35437554 Free PMC article.
References
-
- Beyeler F., Neild A., Oberti S., Bell D. J., Sun Y., Dual J., et al. . (2007). Monolithically fabricated microgripper with integrated force sensor for manipulating microobjects and biological cells aligned in an ultrasonic field. J. Microelectromech. Syst. 16, 7–15. 10.1109/JMEMS.2006.885853 - DOI
-
- Chung S. E., Park W., Park H., Yu K., Park N., Kwon S. (2007). Optofluidic maskless lithography system for real-time synthesis of photopolymerized microstructures in microfluidic channels. Appl. Phys. Lett. 91:041106. 10.1063/1.2759988 - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources