

Optimizing Exoskeleton Assistance for Faster Self-Selected Walking
- PMID: 33877982
- PMCID: PMC8172358
- DOI: 10.1109/TNSRE.2021.3074154
Optimizing Exoskeleton Assistance for Faster Self-Selected Walking
Abstract
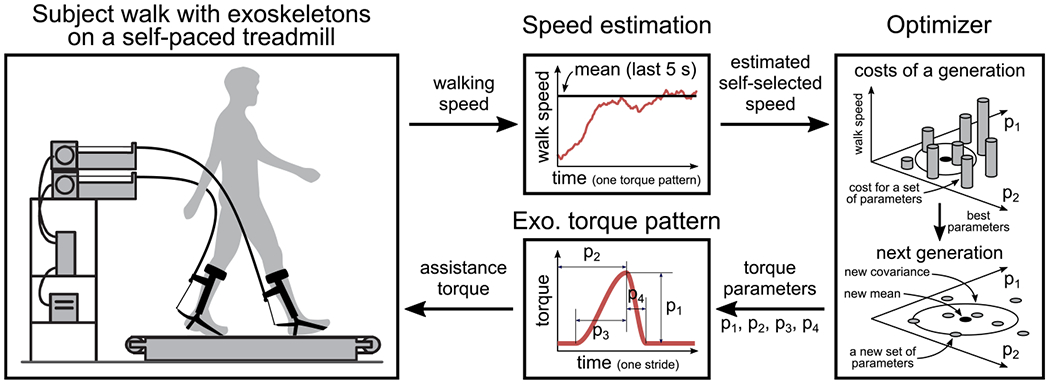
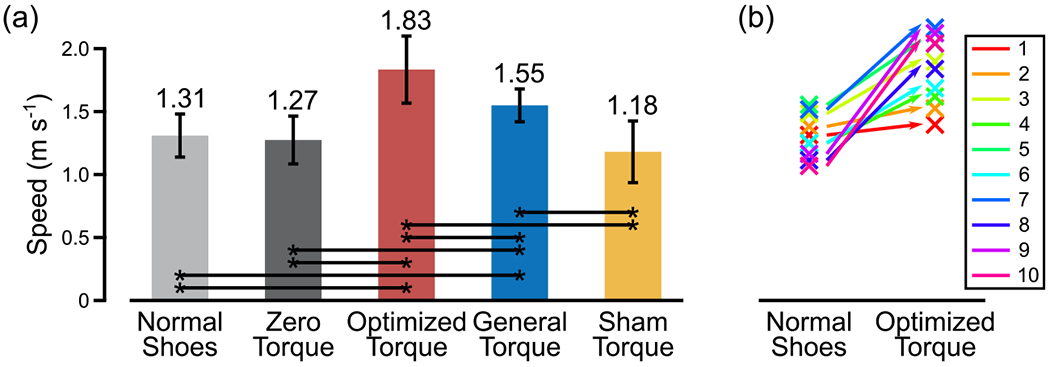
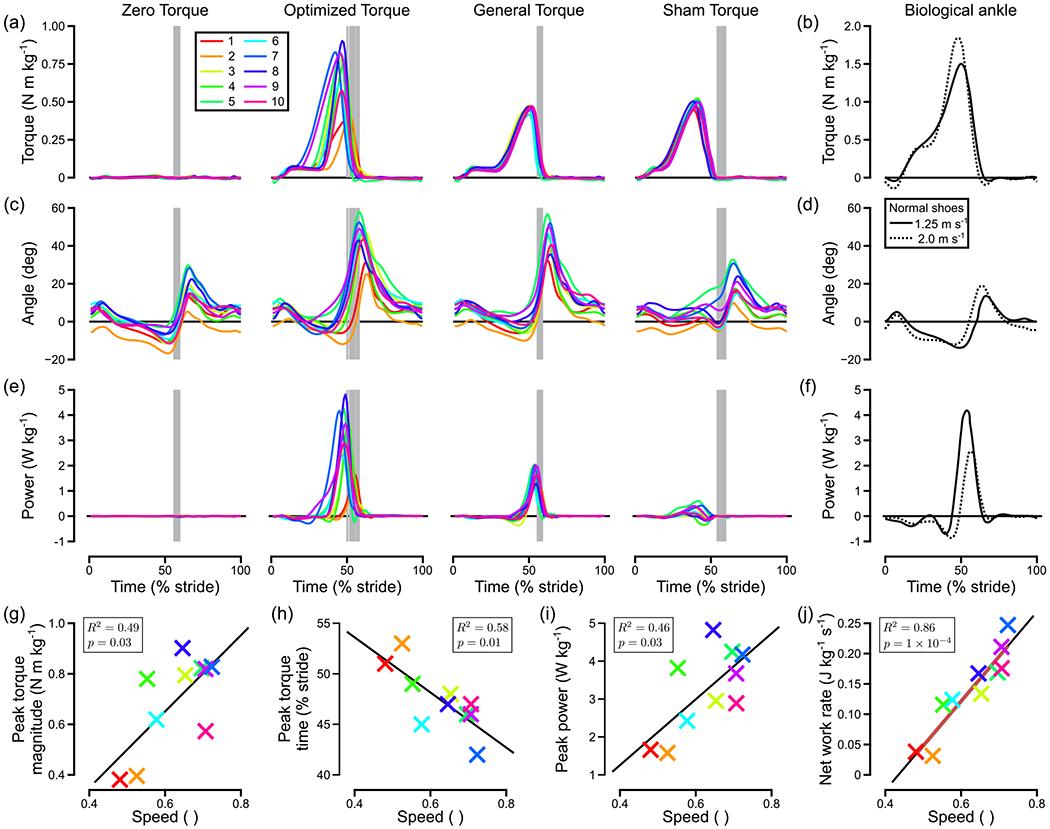
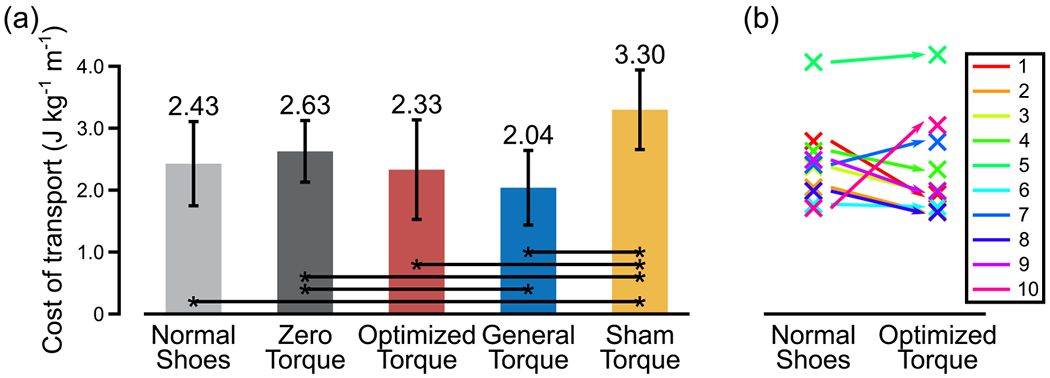
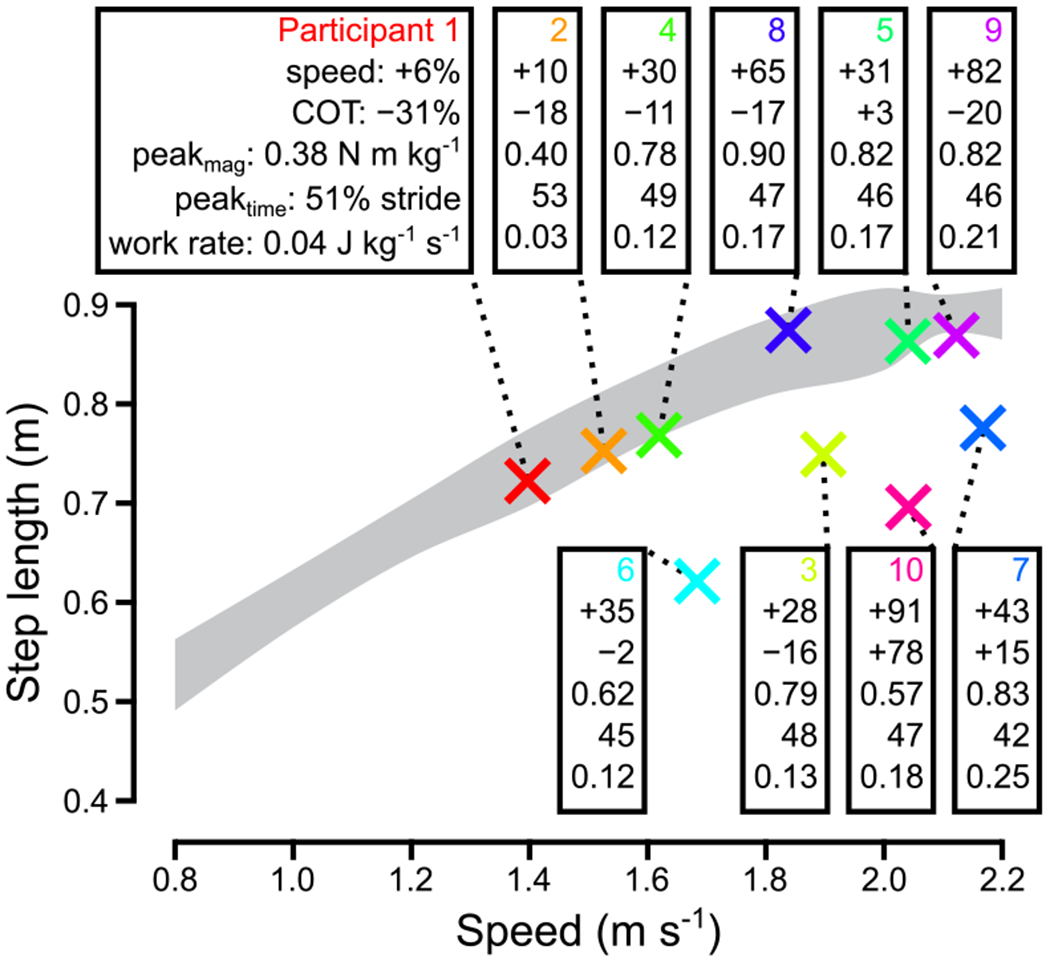
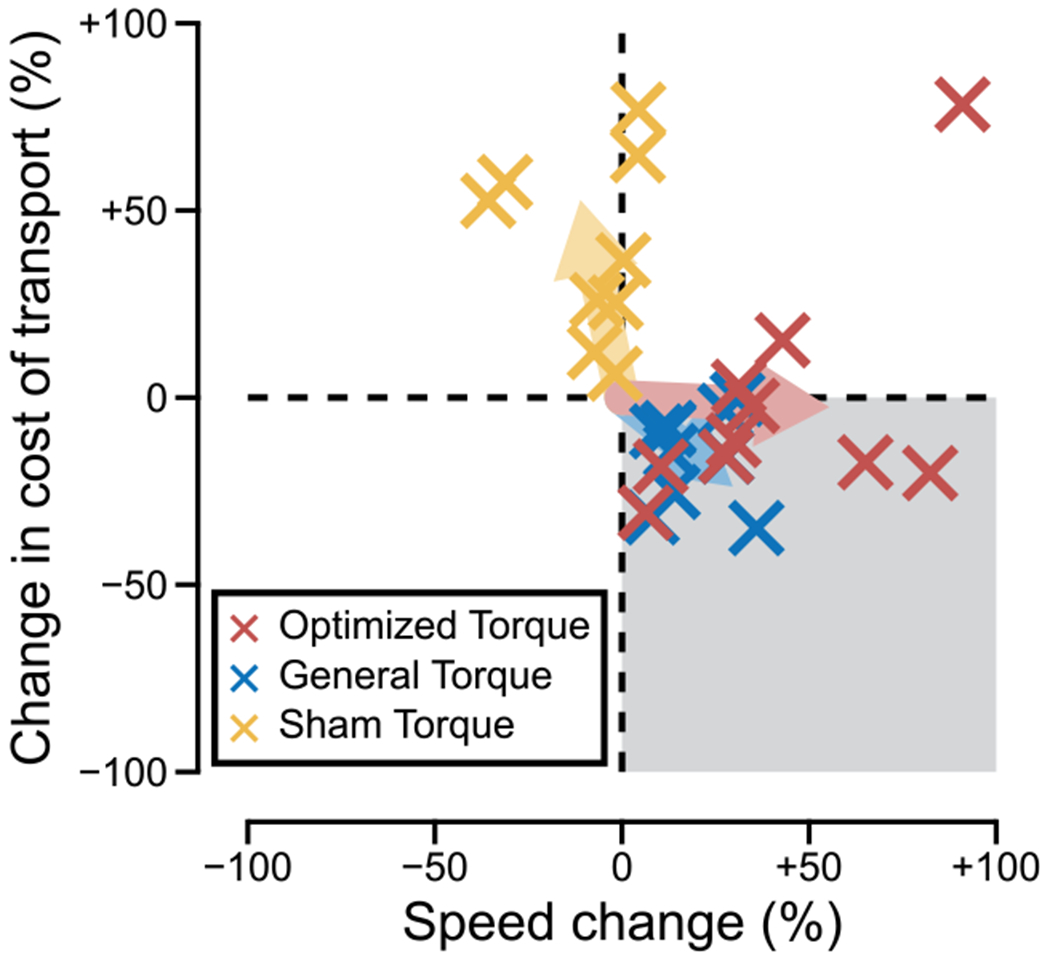
Self-selected walking speed is an important aspect of mobility. Exoskeletons can increase walking speed, but the mechanisms behind these changes and the upper limits on performance are unknown. Human-in-the-loop optimization is a technique for identifying exoskeleton characteristics that maximize the benefits of assistance, which has been critical to achieving large improvements in energy economy. In this study, we used human-in-the-loop optimization to test whether large improvements in self-selected walking speed are possible through ankle exoskeleton assistance. Healthy participants (N =10) were instructed to walk at a comfortable speed on a self-paced treadmill while wearing tethered ankle exoskeletons. An algorithm sequentially applied different patterns of exoskeleton torque and estimated the speed-optimal pattern, which was then evaluated in separate trials. With torque optimized for speed, participants walked 42% faster than in normal shoes (1.83 ms-1 vs. 1.31 ms-1; Tukey HSD, p = 4 ×10-8 ), with speed increases ranging from 6% to 91%. Participants walked faster with speed-optimized torque than with torque optimized for energy consumption (1.55 ms-1) or torque chosen to induce slow walking (1.18 ms-1). Gait characteristics with speed-optimized torque were highly variable across participants, and changes in metabolic cost of transport ranged from a 31% decrease to a 78% increase, with a decrease of 2% on average. These results demonstrate that ankle exoskeletons can facilitate large increases in self-selected walking speed, which could benefit older adults and others with reduced walking speed.
Figures
References
-
- Esquenazi A, Talaty M, and Jayaraman A, “Powered exoskeletons for walking assistance in persons with central nervous system injuries: A narrative review,” PM&R, vol. 9, no. 1, pp. 46–62, January. 2017. - PubMed
-
- Zhang J et al. , “Human-in-the-loop optimization of exoskeleton assistance during walking,” Science, vol. 356, no. 6344, pp. 1280–1284, June. 2017. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
